2. Calcul symbolique avec Python/Sympy#
Marc BUFFAT, dpt mécanique, Université Claude Bernard Lyon 1
Mise à disposition selon les termes de la Licence Creative Commons
Attribution - Pas d’Utilisation Commerciale - Partage dans les Mêmes Conditions 2.0 France.
Some Tex macros & lib $\(\newcommand{\dt}[1] {\frac{d{#1}}{dt}}\)$
# bibliothéque python
%matplotlib inline
import numpy as np
import sympy as sp
import matplotlib.pyplot as plt
from IPython.core.display import HTML
from IPython.display import display,Image
from sympy.physics.vector import init_vprinting
init_vprinting(use_latex='mathjax', pretty_print=False)
2.1. Calcul symbolique avec sympy (sp)#
variable symbolique: Symbol, symbols
fonction symbolique: Function
expression symbolique (variable)
affichage: display
transformation en fonction: lambda
derivation: diff
evaluation numerique: evalf, lambdify
substitution: subs
# symbols
t , a ,omega = sp.symbols('t a omega')
V = sp.Function('V')
display(V(0),V(t+1),omega*t/a)
# expression
Exp = a*sp.sin(omega*t+2)
display(Exp)
# expression symbolique = arbre
def render_sympy_tree(expr):
"""Render the given Sympy Expression as a graphical tree, inside an IPython notebook"""
from sympy.printing.dot import dotprint
import tempfile
import subprocess
import os
from IPython.display import SVG
with tempfile.NamedTemporaryFile(mode='w', delete=False) as out_fh:
out_fh.write(dotprint(expr))
subprocess.run(['/usr/bin/dot', '-Tsvg', out_fh.name, '-o', out_fh.name + ".svg"])
svg = SVG(filename=(out_fh.name + ".svg"))
os.unlink(out_fh.name)
os.unlink(out_fh.name + ".svg")
return svg
display(sp.srepr(Exp))
svg=render_sympy_tree(Exp)
display(svg)
"Mul(Symbol('a'), sin(Add(Mul(Symbol('omega'), Symbol('t')), Integer(2))))"

# fonction / derivation
display("Exp=",Exp)
U = lambda t:Exp
display(sp.diff(U(t),t))
display(sp.diff(Exp,t,t))
'Exp='
# evaluation python
display(Exp.subs({omega:2,a:3}))
UU = sp.lambdify(t,Exp.subs({omega:2.0,a:3}))
TT = np.linspace(0,2*np.pi,100)
YY = UU(TT)
plt.plot(TT,YY)
[<matplotlib.lines.Line2D at 0x7fa55dde3670>]
2.2. Mécanique des systèmes indéformables#

(C) Rubrique à brac (Gotlib)
mécanique: étude générale du mouvement des systèmes physiques
cinématique: (du grec kinêma, le mouvement) est l’étude des mouvements indépendamment des causes qui les produisent, ou, plus exactement, l’étude de tous les mouvements possibles.
dynamique: (du grec dynamikos, puissant, efficace) est une discipline de la mécanique classique qui étudie les corps en mouvement sous l’influence des actions mécaniques qui leur sont appliquées.
Utilisation de la formulation Lagrangienne en mécanique.
2.3. Modèles mécaniques indéformables#
\(R_0\) référentiel fixe
point matériel définit par :
sa position \(P /R_0\) et sa masse \(m\).
solide indéformable définit par
la position \(G /R_0\) du centre de masse, sa masse \(M\),
ses rotations \(\Theta\) par rapport à \(/R_0\) autour du centre de gravité \(G\), et sa matrice d’inertie \(I_G\) en \(G\) \(/R_0\).
dégrés de liberté (DOF) paramêtres indépendants du mouvement
déplacement (translation): maximum 3 (coordonnées du point ou du centre de gravité)
rotation autour d’un point: maximum 3 (rotation ou angles d’Euler)
point matériel: 3 DDL max
solide indéformable: 6 DDL max
2.4. Référentiels: position et dérivation#
\(R_O\) référentiel fixe (orthonormée), repère mobile \(R_P\)
dérivation / repère fixe \(R_O\)
dérivation / repère mobile \(R_P\)
\(\mathcal R\) matrice de rotation de \(R_P\) / \(R_O\), vecteur rotation \(\Omega_{R_P}\) $\( \dt{\vec{R}_{P_x}} = \mathcal{R} \vec{R}_{P_x} = \vec{\Omega}_{R_P}\wedge\vec{R}_{P_x}\)$
loi de composition des vitesses entre 2 points A et B (et des accélérations)
v1pt_theory: A et B quelconques $\( \vec{V}_B | R_O = \vec{V}_A | R_O + \vec{V}_B | R_P + \Omega R_P|R_O \wedge \vec{AB} \)$
v2pt_theory: A et B appartiennent au même solide \(R_P\) ( \(\vec{\Omega}\) (taux de rotation de \(R_P\) / \(R_O\)))
2.5. Equations de Lagrange#
principe des travaux virtuels
définition du Lagrangien $\( L(q_i) = T(q_i,\dot{q}_i)-U(q_i) \)$
bilan des travaux virtuels avec des forces généralisées \(F_i\) $\( \sum \frac{d}{dt}(\frac{\partial L}{\partial \dot{q}_i}) \delta q_i - \sum \frac{\partial L}{\partial q_i} \delta q_i = \sum F_i \delta q_i \)$
équations de Lagrange $\( \frac{d}{dt}(\frac{\partial L}{\partial \dot{q}_i})-\frac{\partial L}{\partial q_i} = F_i \)$
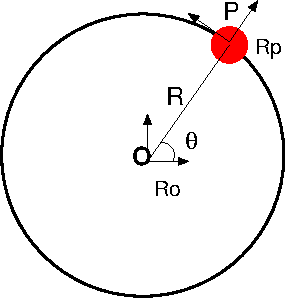
2.6. Masse m sur un cercle de rayon \(R\)#
2.6.1. modélisation sympy#
utilisation bibliothèque Classical Mechanics
sympy.physics.mechanics
Point, ReferenceFrame
ddl dynamicsymbols
2.6.2. paramètres et DDL#
Mouvement plan avec un seul degré de liberté \(\theta(t)\)
degré de liberté: \(\theta(t)\)
paramètres du problème
from sympy.physics.mechanics import dynamicsymbols, Point, ReferenceFrame
theta = dynamicsymbols('theta')
R,m,g = sp.symbols('R m g')
print(theta,R)
display(theta*R)
theta(t) R
2.6.3. Référentiel et point#
fonctions ReferenceFrame et Point
\(R_O\) repère de base et \(R_P\) repère lié au point
definit les points
affiche les coordonnées dans un repère dcm matrice de passage de \(R_O\) dans \(R_P\) (direction cosinus matrix)
O = Point('O')
RO = ReferenceFrame('R_O')
P = Point('P')
RP = ReferenceFrame('R_P')
RP.orient(RO,'Axis',[theta, RO.z])
P.set_pos(O,R*RP.x)
P.pos_from(O),P.pos_from(O).express(RO)
2.6.4. cinématique#
on spécifie la vitesse de O et la vitesse P dans \(R_P\)
utilisation de la fonction v1pt_theory
O.set_vel(RO,0.)
P.set_vel(RP,0.)
P.v1pt_theory(O,RO,RP)
VP = P.vel(RO)
VP,VP.express(RO),O.vel(RO) + P.vel(RP) + RP.ang_vel_in(RO).cross(P.pos_from(O))
2.6.5. accélération#
calcul accélération de \(P\) dans \(R_O\)
formule de composition des accélérations $\( \vec{\Gamma}_P | R_O = \vec{\Gamma}_P| R_P + \vec{\Gamma}_O| R_O + \frac{d}{dt}(\vec{\Omega}_{R_P}) \wedge \vec{OP} + \vec{\Omega}_{R_P}\wedge\vec{\Omega}_{R_P}\wedge\vec{OP} + 2 \vec{\Omega}_{R_P} \wedge \vec{V_P}|R_P \)$
utilisation de a1pt_theory
P.a1pt_theory(O,RO,RP)
GP = P.acc(RO)
GP, GP.express(RO)
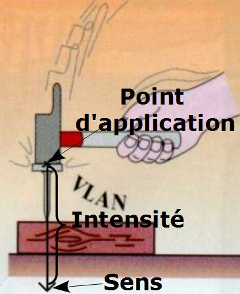
2.6.6. bilan des forces#
2.6.7. formalisme lagrangien#
définition d’une particule Par de position \(P\) et de masse \(m\)
# point materiel = particule masse m
from sympy.physics.mechanics import Particle
Pa = Particle('Pa',P,m)
display(Pa.point.vel(RO),Pa.kinetic_energy(RO))
# energie potentiel
Pa.potential_energy = m*g*Pa.point.pos_from(O).dot(RO.y)
Pa.potential_energy
# lagrangien
from sympy.physics.mechanics import Lagrangian, LagrangesMethod
LPa = Lagrangian(RO,Pa)
display(LPa)
# equations de lagrange
LMa = LagrangesMethod(LPa,[theta])
LMa.form_lagranges_equations()
2.7. Solide en rotation / a O#
barre en rotation autour de O
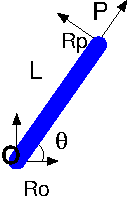
2.7.1. repère et point#
repere fixe \(R_O\), lié au solide \(R_P\)
points O, P et G
paramètres L et DDL \(\theta\)
theta = dynamicsymbols('theta')
L = sp.symbols('L')
O = Point('O')
RO = ReferenceFrame('R_O')
P = Point('P')
RP = ReferenceFrame('R_P')
RP.orient(RO,'Axis',[theta, RO.z])
P.set_pos(O,L*RP.x)
G = Point('G')
G.set_pos(O,L/2*RP.x)
2.7.2. masse / inertie d’un solide#
la tige \(OP\) est un solide (cylindre homogène):
de longueur \(L\) et de rayon \(a\), de masse \(M\)
de centre de gravité \(G\) tq \(\vec{OG} = \frac{1}{2} \vec{OP}\)
de matrice d’inertie en \(G\) dans \(R_P\)
- avec $I_{x} = \frac{1}{2} M a^2 $ et $I_{y} = \frac{1}{4} M a^2 + \frac{1}{12} M L^2$
from sympy.physics.mechanics import inertia
a,M,g = sp.symbols('a M g')
Ix = M*a**2/2
Iy = M*a**2/4 + M*L**2/12
IG = inertia(RP,Ix,Iy,Iy)
display(IG)
2.7.3. vitesse#
utilisation de la composition des vitesses: O,G et P appartiennent au même solide
fonction v2pt_theory
O.set_vel(RO,0.)
P.v2pt_theory(O,RO,RP)
G.v2pt_theory(O,RO,RP)
P.vel(RO),G.vel(RO)
2.7.4. Bilan des forces#
2.7.5. définition solide indéformable#
RigidBody
from sympy.physics.mechanics import Lagrangian, RigidBody, LagrangesMethod
TigeOP = RigidBody('TigeOP',G,RP,M,(IG,G))
TigeOP.kinetic_energy(RO).simplify()
# energie potentiel
TigeOP.potential_energy = M*g*G.pos_from(O).dot(RO.y)
TigeOP.potential_energy
LT = Lagrangian(RO,TigeOP)
display(LT)
LMT = LagrangesMethod(LT,[theta])
LMT.form_lagranges_equations()
2.8. FIN de la leçon#
