7.9. Modélisation d’un pendule double par IA#
Marc Buffat, dpt mécanique, Lyon 1
inspiré de Deep Learning with Real Data and the Chaotic Double Pendulum on https://cloud4scieng.org

7.9.1. Problème#
Expérience du double pendule
Marc Buffat, dpt mécanique, Lyon 1
inspiré de Deep Learning with Real Data and the Chaotic Double Pendulum on https://cloud4scieng.org
Expérience du double pendule
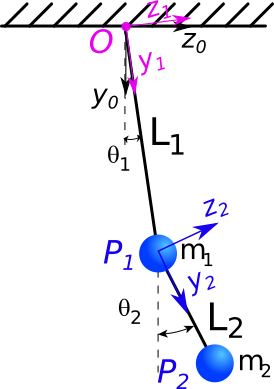
On doit donc définir:
les parametres du problème: longueur et masse des 2 pendules \(l_1,m_1,l_2,m_2\)
les 2 ddl du problème: \(\theta_1(t)\) et \(\theta_2(t)\)
Système conservatif: équation de Lagrange
Pour résoudre numériquement ce système, nous devons le transformer en un système d’équations différentielles du premier ordre.
On choisit comme vecteur d’état \(U = [\theta_1, \dot{\theta_1},\theta_2, \dot{\theta_2}]\), et on écrit le système sous la forme $\( \dot{U} = \mathbf{F} U\)$
\(u_0 =[\theta_1(0),0.,\theta_2(0),0.]\) conditions initiales (dim=4)
vecteur d’état \(V ~=~ [\theta_1, \dot{\theta_1}, \theta_2, \dot{\theta_2} ]\)
u[0] = angle du premier pendule
u[1] = vitesse angulaire du premier pendule
u[2] = angle du second pendule
u[3] = vitesse angulaire du second pendule
Le vector \(V ~=~ [\theta_1, u_1, \theta_2, u_2 ]\) contient les 2 angles \(\theta_1\) et \(\theta_2\) et les vitesses angulaires \(u_1\) and \(u_2\)
En posant \(c=cos(\theta_1 - \theta_2 )\) et \(s = sin(\theta_1 - \theta_2 )\)
paramètres \(m_1,m_2,L_1,L_2,g\)
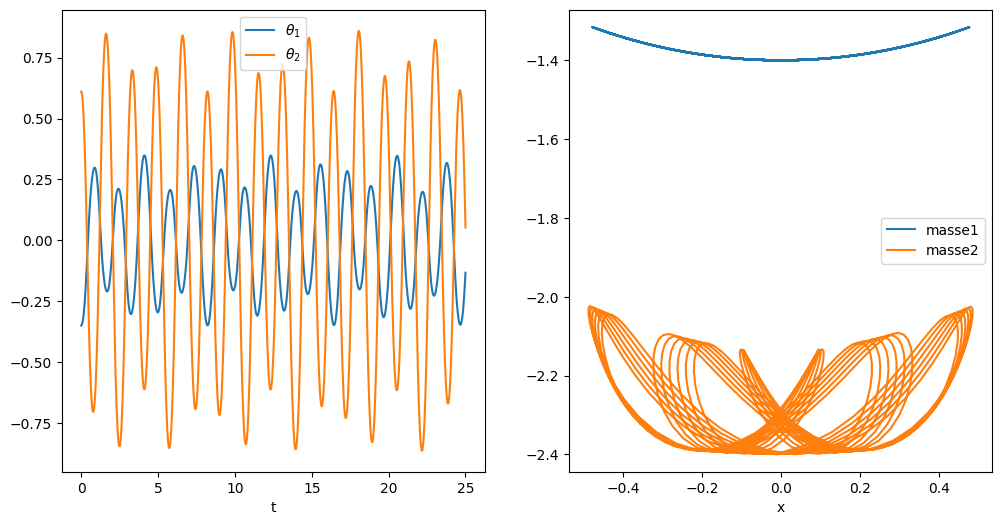
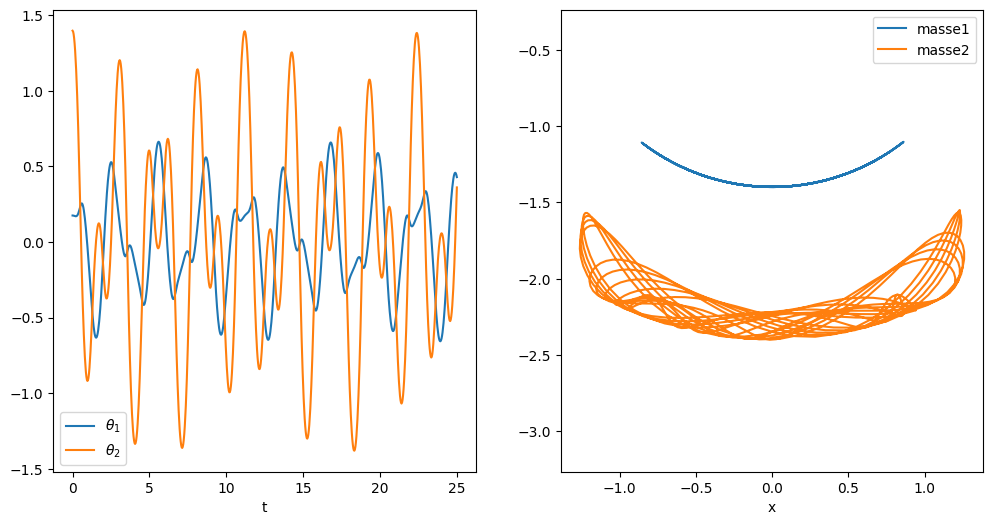
calcul de la solution en N temps équi-répartis
Peut on prédire la trajectoire du système sans faire la simulation, en utilisant un apprentissage à partir d’une base de données issue de la simulation.
En se donnant la valeur de solution sur 10 valeurs en temps consécutives, peut on prédire l’évolution de la solution sur des temps longs: p.e. sur les 100 pas en temps suivants
Pour créer la base de données, on découpe la simulation avec une fenêtre glissante de 10 valeurs en temps consécutives pour prédire la valeur de la solution à l’instant t
train_seq: données (data) tableau dim (10,4)
train_label: résultat dim (4)
création de la BD avec une technique de fenêtre glissante et d’adimensionalisation
BD: 741
valeurs BD: (tensor([[-1.0000e+00, 8.2172e-04, 7.1066e-01, -4.9913e-04],
[-9.9434e-01, 8.7259e-02, 7.0519e-01, -8.1255e-02],
[-9.7731e-01, 1.7447e-01, 6.8877e-01, -1.6236e-01],
[-9.4877e-01, 2.6318e-01, 6.6132e-01, -2.4412e-01],
[-9.0847e-01, 3.5398e-01, 6.2273e-01, -3.2680e-01],
[-8.5612e-01, 4.4723e-01, 5.7288e-01, -4.1047e-01],
[-7.9139e-01, 5.4281e-01, 5.1165e-01, -4.9485e-01],
[-7.1403e-01, 6.3974e-01, 4.3898e-01, -5.7900e-01],
[-6.2400e-01, 7.3561e-01, 3.5504e-01, -6.6078e-01],
[-5.2172e-01, 8.2584e-01, 2.6040e-01, -7.3621e-01]]), tensor([[-0.4084, 0.9032, 0.1563, -0.7990]]))
réseau de neuronnes récurrents: LSTM « neural network » nn de pyTorch
paramétres
taille des données élémentaires input_size= 4 : 4 données / temps = \(\theta_1, \theta_2, \dot{\theta_1},\dot{\theta_2} \)
nbre de couches de neuronnes cachés (depliement de la récurrence en temps) hidden_size=100 pas en temps
optimisation: méthode d’optimisation par gradient, algorithme stochastique de gradient d’ADAM
utilisation des états précédents (états cn (long-term memory) et états cachés hn (short-term memory))
lstm = nn.LSTM(input_size, hidden_size, num_LSTM=1)
output, (hn,cn) = lstm(input, (h0,c0))
attention pytorch a sa propre version des tableaux (torch tensor)
conversion données: tableau 1D 100 -> sortie dim 4
Linear(100, 4)
apprentissage
à partir de la base de données initiale: simulation (751,4)
fenêtrage: 741 fenêtres glissantes (10,5) -> (4)
on choisit au hasard 500 fenêtres pour faire l’apprentissage ( pour 1 passage)
on réitère le processus complet epochs fois. epochs est un hyperparamètre qui définit le nombre de fois que l’algorithme d’apprentissage parcours l’ensemble des données d’entraînement. Ce paramétre peut etre très grand !
recalcul model:lstm-pend1 nbepochs=52
/home/buffat/venvs/jupyter/lib/python3.10/site-packages/torch/autograd/__init__.py:200: UserWarning: CUDA initialization: The NVIDIA driver on your system is too old (found version 9010). Please update your GPU driver by downloading and installing a new version from the URL: http://www.nvidia.com/Download/index.aspx Alternatively, go to: https://pytorch.org to install a PyTorch version that has been compiled with your version of the CUDA driver. (Triggered internally at ../c10/cuda/CUDAFunctions.cpp:109.)
Variable._execution_engine.run_backward( # Calls into the C++ engine to run the backward pass
epoch: 1 loss: 0.01505351
seq: 1 loss: 3.25216733
epoch: 3 loss: 0.00025682
seq: 3 loss: 0.18376897
epoch: 5 loss: 0.00014668
seq: 5 loss: 0.21797341
epoch: 7 loss: 0.00075469
seq: 7 loss: 0.11024632
epoch: 9 loss: 0.00024955
seq: 9 loss: 0.12144019
epoch: 11 loss: 0.00021650
seq: 11 loss: 0.09058059
epoch: 13 loss: 0.00007820
seq: 13 loss: 0.10575360
epoch: 15 loss: 0.00017686
seq: 15 loss: 0.42198471
epoch: 17 loss: 0.00006502
seq: 17 loss: 0.10770231
epoch: 19 loss: 0.00010987
seq: 19 loss: 0.13459274
epoch: 21 loss: 0.00007744
seq: 21 loss: 0.21146205
epoch: 23 loss: 0.00029414
seq: 23 loss: 0.21190936
epoch: 25 loss: 0.00047763
seq: 25 loss: 0.10344179
epoch: 27 loss: 0.00022167
seq: 27 loss: 0.04047549
epoch: 29 loss: 0.00066361
seq: 29 loss: 0.07751106
epoch: 31 loss: 0.00032528
seq: 31 loss: 0.09540407
epoch: 33 loss: 0.00085075
seq: 33 loss: 0.10937494
epoch: 35 loss: 0.00001382
seq: 35 loss: 0.03735177
epoch: 37 loss: 0.00001100
seq: 37 loss: 0.11880642
epoch: 39 loss: 0.00006818
seq: 39 loss: 0.06761478
epoch: 41 loss: 0.00003622
seq: 41 loss: 0.03080786
epoch: 43 loss: 0.00003321
seq: 43 loss: 0.11387769
epoch: 45 loss: 0.00020217
seq: 45 loss: 0.07403137
epoch: 47 loss: 0.00011312
seq: 47 loss: 0.05696190
epoch: 49 loss: 0.00000965
seq: 49 loss: 0.09897501
epoch: 51 loss: 0.00054223
seq: 51 loss: 0.06909767
FIN epoch: 51 loss: 0.0005422260
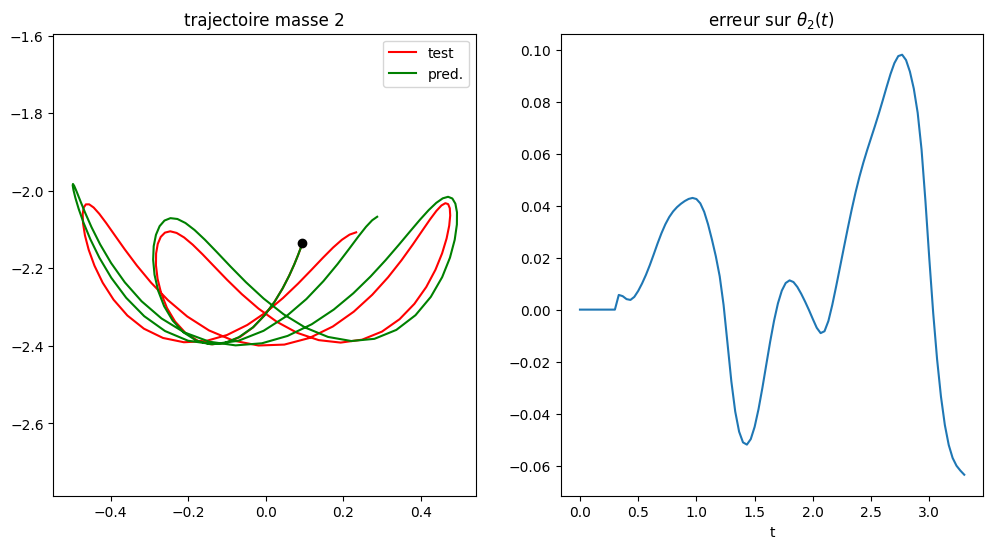
à partir de données data, on utilise les train_window=10 données initiales pour prédire la solution aux steps=100 pas en temps suivants
test sur la base de données d’apprentissage avec steps=100 et steps=200
test sur une autre base de données
data set length = 751 pred= 100 mean error = 0.031581153573318775 maxerr = 0.0980479744670017 at 83
data set length = 751 pred= 100
mean error = 0.031581153573318775
maxerr = 0.0980479744670017 at 83
data set length = 751 pred= 200
mean error = 0.08418902912197787
maxerr = 0.29675144719920316 at 185

data set length = 751 pred= 100
mean error = 0.09653476548880306
maxerr = 0.3060819799157 at 93

data set length = 751 pred= 100
mean error = 0.31714558863685754
maxerr = 1.1709687741336705 at 93
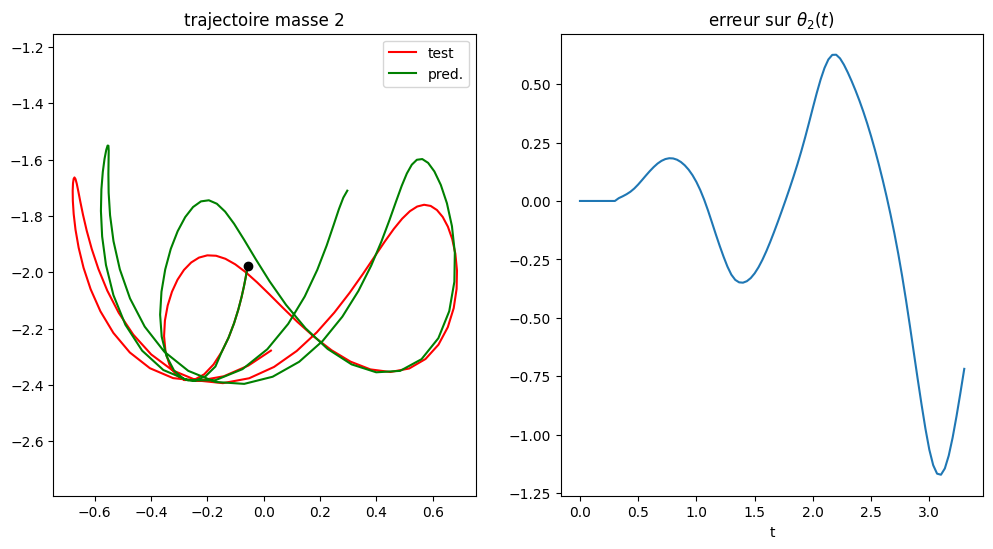
Nous remarquons que l’apprentissage LSTM avec une unique solution permettait au LSTM de générer des solutions raisonnablement bonnes à partir de points proches du point initial de la solution.
contrainte sur l’évolutionn du système :
système conservatif: Ec + Ep = cste
minimisation sous contrainte
Réseaux de neuronnes inspiré par la physique !!!
c’est nouvelle classe de réseaux de neurones qui hybride apprentissage automatique et lois physiques permettant une « meilleur » prédiction des réseaux de neuronnes (Deep Learning) pour des applications physiques gérées par des équations (ODE ou PDE):
voir le site https://metalblog.ctif.com/2022/01/17/physics-informed-neural-networks/
attention: ce ne sont que la prise en compte de contraintes liées aux propriétés physiques du système étudié aucune connaissance (compréhension) de la physique dans ces algorithmes.