7.3. TP méthode de minimisation multi-dimensionnelle#
Marc Buffat Dpt mécanique, UCB Lyon 1
%matplotlib inline
#algèbre linéaire
import numpy as np
import sympy as sp
import time
#représentation des résultats
import matplotlib.pyplot as plt
from IPython.display import display,Markdown
def printmd(text):
display(Markdown(text))
plt.rc('font', family='serif', size='18')
from validation.validation import info_etudiant
def printmd(string):
display(Markdown(string))
# test si numero étudiant spécifier
try: NUMERO_ETUDIANT
except NameError: NUMERO_ETUDIANT = None
if type(NUMERO_ETUDIANT) is not int :
printmd("**ERREUR:** numéro d'étudiant non spécifié!!!")
NOM,PRENOM,NUMERO_ETUDIANT=info_etudiant()
#raise AssertionError("NUMERO_ETUDIANT non défini")
# parametres spécifiques
_uid_ = NUMERO_ETUDIANT
np.random.seed(_uid_)
printmd("**Login étudiant {} {} uid={}**".format(NOM,PRENOM,_uid_))
# fonctionnelle a minimiser
import pwd,sys
libpath=pwd.getpwnam('cours')[5]+'/IntroIA/lib'
sys.path.insert(0, libpath)
from Fonctionnelle import Fonctionnelle
J = Fonctionnelle(_uid_)
printmd("**Fonctionnelle J à minimiser**")
J.info()
7.3.1. Objectifs#
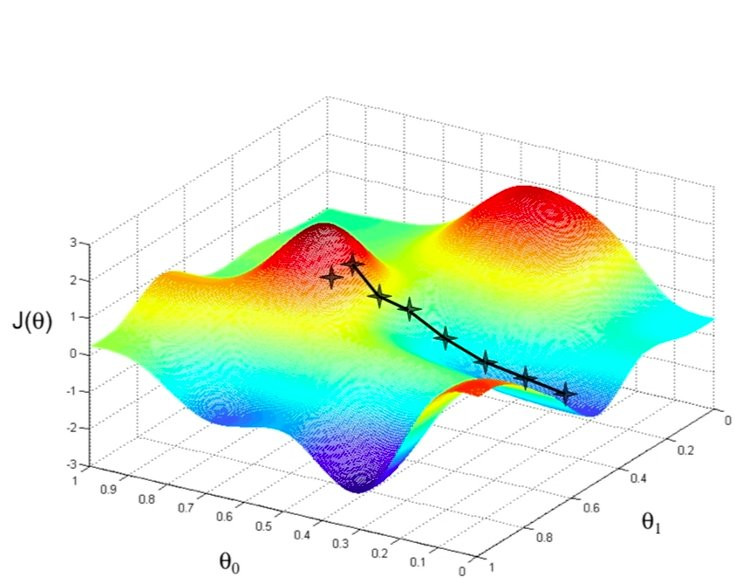
Trouver le vecteur X minimisant la fonction J(X).
Cette fonction J() est implémentée en Python comme un objet (instance de classe):
J : nom de l’objet
J.dim() : dimension de X, i.e. le nombre de variables dont J dépend
J(X) : calcul la valeur de J pour un vecteur X de dimension J.dim()
J.grad(X) : calcul le gradient de J en X
J.err(X) : calcul la norme de l’erreur ||X-Xe|| où Xe minimise J(X)
J.min() : calcul le minimum de J
7.3.2. Minimisation 1D#
Etude de la minimisation de \(J(\mathbf{X})\) dans une direction \(\mathbf{D}\) fixée
On choisit un vecteur \(D\) (imposé), et on cherche à minimiser \(J(\alpha \mathbf{D})\)
Dans les cellules suivantes:
calculer \(J(\alpha \mathbf{D})\) pour des valeurs de \(\alpha\) entre -2 et 2
tracer la fonction \(J(\alpha)\)
utiliser la fonction
minimize_scalarde scipy pour calculer le mimimum en \(\alpha\)mettre le resultat dans la variable
alpha_min
# calcul variation dans une direction D
D = np.zeros(J.dim())
D[NUMERO_ETUDIANT % J.dim()] = 1
Alpha = None
JAlpha = None
### BEGIN SOLUTION
### END SOLUTION
from scipy.optimize import minimize_scalar
alpha_min = None
### BEGIN SOLUTION
### END SOLUTION
print(f"alpha={alpha_min} minimise J suivant D\n",D)
assert(J.err1D(alpha_min,D)<1.e-5)
7.3.3. Minimisation multi-dimensionelle#
utilisation de la bibliothéque scipy
fonction minimize (minimisation locale)
méthode de gradients exactes: Gradients Conjugués, Newton GC,
méthode de gradients approchées: BFGS,
line search Powell, Simplex Nelder-Mead
optimisation globale
simulated annealing
Dans la cellule suivante, définir 2 nouvelles fonctions
F(X) qui calcul J(X)
Fgrad(X) qui calcule le gradient
on définit des fonctions python car les méthodes de minimisation n’autorisent pas les méthodes de classe
F = None
Fgrad = None
### BEGIN SOLUTION
### END SOLUTION
X0 = np.zeros(J.dim())
print("solution initiale X0:\n",X0)
assert np.allclose(F(X0),J(X0))
assert np.allclose(Fgrad(X0),J.grad(X0))
7.3.3.1. Méthode par défaut#
pour chacune des méthodes:
on calcule la solution obtenue Xe,
la valeur de J
l’erreur (qui doit etre inférieure à 1.e-5)
Il faut aussi jouer sur les paramètres optionnels de la fonction
from scipy.optimize import minimize
Xe = None
### BEGIN SOLUTION
### END SOLUTION
print(f"J={J(Xe)} avec erreur={J.err(Xe)} pour X:\n",Xe)
assert( J.err(Xe) < 1.e-5)
7.3.3.2. Méthode de gradient conjugué#
Xe = None
### BEGIN SOLUTION
### END SOLUTION
print(f"J={J(Xe)} avec erreur={J.err(Xe)} pour X:\n",Xe)
assert( J.err(Xe) < 1.e-5)
7.3.3.3. Méthode de gradient conjugué avec Newton#
Xe = None
### BEGIN SOLUTION
### END SOLUTION
print(f"J={J(Xe)} avec erreur={J.err(Xe)} pour X:\n",Xe)
assert( J.err(Xe) < 1.e-5)
7.3.3.4. Méthode BFGS (gradient avec calcul d’un gradient numérique)#
Xe = None
### BEGIN SOLUTION
### END SOLUTION
print(f"J={J(Xe)} avec erreur={J.err(Xe)} pour X:\n",Xe)
assert( J.err(Xe) < 1.e-5)
7.3.3.5. Algorithme Powell (line search 2D)#
Xe = None
### BEGIN SOLUTION
### END SOLUTION
print(f"J={J(Xe)} avec erreur={J.err(Xe)} pour X:\n",Xe)
assert( J.err(Xe) < 1.e-3)
7.3.3.6. Simulated annealing#
from scipy.optimize import dual_annealing
Xe = None
### BEGIN SOLUTION
### END SOLUTION
print(f"J={J(Xe)} avec erreur={J.err(Xe)} pour X:\n",Xe)
assert( J.err(Xe) < 1.e-4)
7.3.3.7. Méthode du Simplex (Nelder-Mead)#
Xe = None
### BEGIN SOLUTION
# non cvge
### END SOLUTION
print(f"J={J(Xe)} avec erreur={J.err(Xe)} pour X:\n",Xe)
#assert( J.err(Xe) < 0.8)
7.3.4. Analyse#
comparaison des méthodes
coût
précision
Ecrivez votre analyse en markdown
7.3.5. FIN#