4. Écoulement à surface libre#
objectifs: appréhender les domaines de l’hydraulique, hydrodynamique maritime et la notion d’ondes de surface

Fig. 4.3 crue de rivière#

Fig. 4.4 tsunami au japon#

Fig. 4.5 sillage à l’arrière d’un bateau#
4.1. Modèle en eau peu profonde (rivière)#
fluide incompressible (eau), effet de gravité, surface libre, faible profondeur
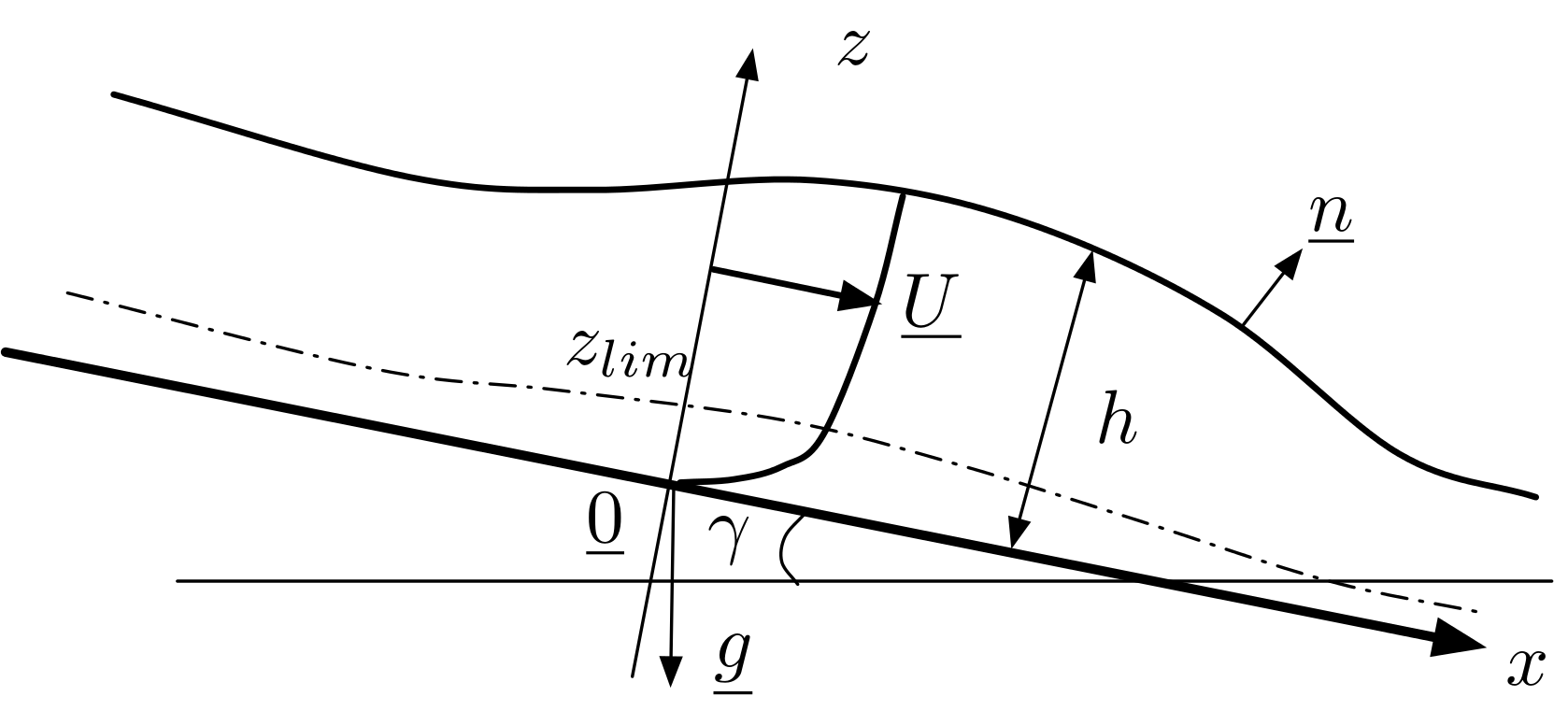
Fig. 4.6 modèle en eau peu profonde#
Équations de Navier-Stokes en 2D \(\overrightarrow{U}=(u,v)\)
paramétres: \(U_{0}\), \(L\) , \(\tau_{0}\) \(h\), \(g\), \(\gamma\), \(\mu\), \(\rho\)
5 nombres sans dimension
l’échelle de vitesse suivant \(z\) est petite : \(W_{0}\approx\epsilon U_{0}\)
exemple:
\(\mu=10^{-3}\,Pa\,s\), \(\rho=10^{3}\,kg/m^{3}\), \(U_{0}=1-10m/s\) , \(h\sim1\,m\), \(L\approx km\)
hypothèses:
quantités moyennes
répartition de pression hydro-statique en \(z\) avec \(p=P_{0}\) à la surface
frottement \(\tau_{w}\) à la paroi
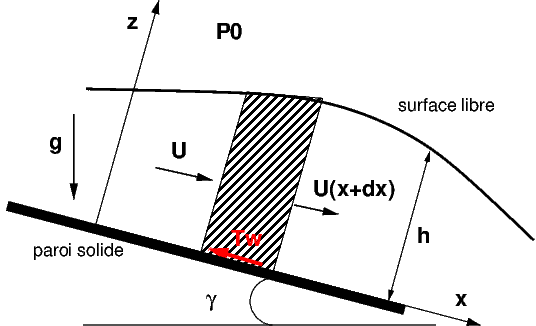
Fig. 4.7 modèle de Saint Venant#
Bilan de masse sur une tranche de fluide \(hdxdy\)
DL à l’ordre 1:
bilan de quantité de mouvement sur une tranche de fluide \(hdxdy\)
répartition de pression hydrostatique suivant \(z\)
DL à l’ordre 1 avec \(\tau_{w}=C_{f}\rho U^{2}\)
si l’angle est petit: \(\gamma\ll 1\)
On obtiens aisni les équation de St Venant, du nom de Adhémar-Jean-Claude Barré de Saint-Venant (ingénieur mathématicien français 1797-1886)
Équation avec surface libre
écoulement de vitesse moyenne \(\overrightarrow{U}(x,t)=U\overrightarrow{e_{x}}\) et de hauteur d’eau \(h(x)\)
remarque: on peut les obtenir par dérivation à partir de Navier-Stokes en considérant les moyennes
En 2D équation avec surface libre
écoulement de vitesse moyenne \(\overrightarrow{U}(x,y)=U\overrightarrow{e_{x}}+V\overrightarrow{e_{y}}\) de hauteur \(h(x,y)\)
le moteur de l’écoulement est la gravité qui compense le frottement au fond:
Les nombres sans dimension importants sont:
nombre de Froude
nombre de Reynolds
la loi de frottement
4.2. Ondes de surface en eau peu profonde#
dans le cas de petites perturbations dans le réfèrentiel suivant le mouvement moyen \(U_{0}\):
\(h=h_{0}+\delta h\), \(U= 0 + \delta u\)
Equations de propagation d’ondes de surface
c’est un système hyperbolique linéaire de propagation d’ondes, qui après élimination de \(\delta u\) donne:
Equations des ondes
cette équation traduit la propagation d’ondes de surface (vague) avec une célérité \(c_{0}=\sqrt{gh_{0}}\) (soit \(U_{0}\pm c_{0}\) dans le référentiel fixe)
4.2.1. Forme dimensionnelle#
on pose \(h'=\delta h/h_{0}\), \(u'=\delta u/U_{0}\)
système hyperbolique linéaire de propagation d’ondes
propagation d’ondes de surface (vague) avec une célérité
La solution générale s’écrit:
Onde simple: \(h'(x,t)=A\sin(kx-\omega t+\phi)=Ae^{\bm{i}k(x-ct)}+cc\)
nombre d’onde \(k=\frac{2\pi}{\lambda}\), \(\lambda\) longueur d’onde
pulsation \(\omega=\frac{2\pi}{T}=2\pi f\), \(T\) période, \(f\) fréquence
vitesse de phase (célérité): \(v_{\phi}=\frac{\omega}{k}=c\)
vitesse de groupe: \(v_{g}=\frac{d\omega}{dk}\)
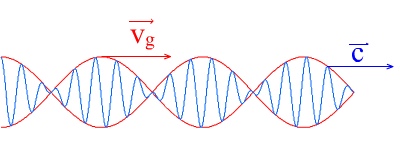
Fig. 4.8 vitesse de groupe#

Fig. 4.9 animation vitesse de groupe (vert) versus phase (rouge)#

Fig. 4.10 Ondes en eau peu profonde#
en milieu peu profond \(L_{0}\gg h\)
déformation de la surface libre \(h'=Ae^{kx-\omega t}\) avec \(\omega=kc_{0}\)
La célérité \(c_{0}=\sqrt{gh}\) (vitesse de phase) est indépendante de \(k\), mais fonction de \(h\)
\(\Longrightarrow\) la vitesse de groupe \(v_{g}=c_{0}\) est constante (indépendante de \(k\)):
donc toutes les ondes se propagent à la même vitesse
\(\Longrightarrow\) pas de dispersion d’ondes, mais possibilité de déferlement si \(h\) varie
4.3. Modèle en eau profonde (océan)#

Fig. 4.11 vagues sur l’océan#
création des vagues par effet du vent puis propagation des vagues
attention milieu profond donc l’analyse précédente est non applicable
hypothèse:
pas d’effet du fond (\(h_{0}\) tres grand) néglige \(\tau_{w}\)\(\leadsto\) fluide parfait incompressible
écoulement potentiel (irrotationnel) \(\overrightarrow{U}=\overrightarrow{grad}\phi\)
\(h'(x,y,t)\) est la fluctuation de la surface libre
hauteur d’eau \(h(x,y,t)=h_{0}+h'(x,y,t)\)
fond \(z=-h_{0}\)
Si \(\overrightarrow{U}=\overrightarrow{grad}\phi\) , alors
Le système d’équations s’écrit alors:
On choisit d’écrire la pression sous la forme
avec les conditions suivantes:
cdt limite au fond en \(z=-h_{0}\)(paroi impermeable \(Uz=0\)) \(\frac{\partial\Phi}{\partial z}=0\)
cdt limite à la surface libre en \(z=h'(x,y,t)\): \(V_{z}=\frac{Dh}{Dt}\) et \(p=p_{0}\)
Le système d’équations s’écrit alors:
Equations d’Airy
4.4. Ondes de surface en eau profonde#
Pour de petits mouvements \(h'(x,t)\ll1\): on cherche une solution sous la forme d’une onde:
solution de l’équation:
La solution est de la forme
qui vérifie la cdt \(\frac{\partial\Phi}{\partial z}=0\) sur le fond \(z=-h_{0}\)
Cette solution vérifie les cdts (linéarisées) sur la surface libre: \(z=h' \mbox{ avec } h_{0}+h'\approx h_{0}\)
En notant \(c\) la célérité et en reportant dans l’équation, il vient
d’où la relation sur la célérité:
en eau profonde \(kh_{0}\gg1\) : \(tanh(kh_{0})\approx1\)
on obtiens des ondes dispersives
en eau peu profonde \(kh_{0}\ll1\): \(tanh(kh_{0})\approx kh_{0}\)
on obtiens des ondes non dispersives
Les paramètres pour les ondes en eau profonde sont :
Onde simple: \(h'(x,t)=A\sin(kx-\omega t+\phi)=Ae^{i\,k(x-ct)}+cc\)
nombre d’onde \(k=\frac{2\pi}{\lambda}\), \(\lambda\) longueur d’onde
pulsation \(\omega=\frac{2\pi}{T}=2\pi f\), \(T\) période, \(f\) fréquence
vitesse de phase (célérité): \(v_{\phi}=\frac{\omega}{k}=c\)
vitesse de groupe: \(v_{g}=\frac{d\omega}{dk}\)
Fig. 4.12 vitesse de groupe (vert) et de phase (rouge)#
\(U=i\,kA_{0}cosh(k(z+h_{0}))e^{i\,k(x-ct)}\mbox{ et }W=kA_{0}sinh(k(z+h_{0}))e^{\bm{i}k(x-ct)}\)
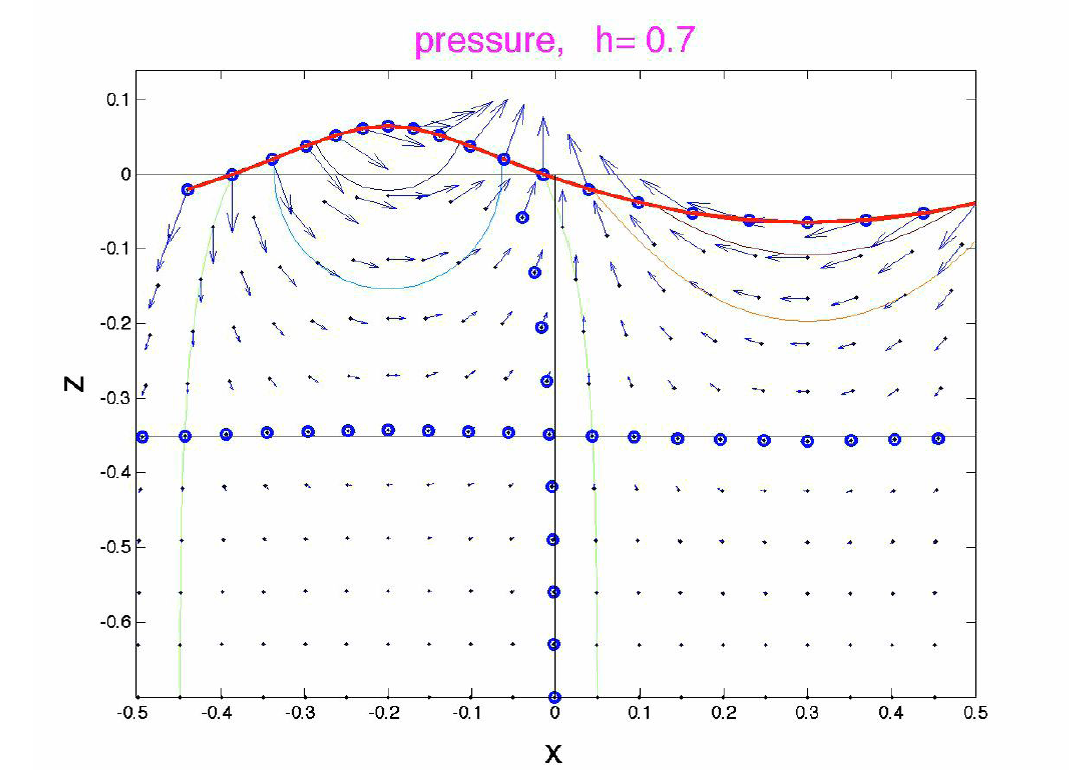
Fig. 4.13 Ondes de surface#

Fig. 4.14 Propagation de vagues#

Fig. 4.15 animation de la propagation de vagues#
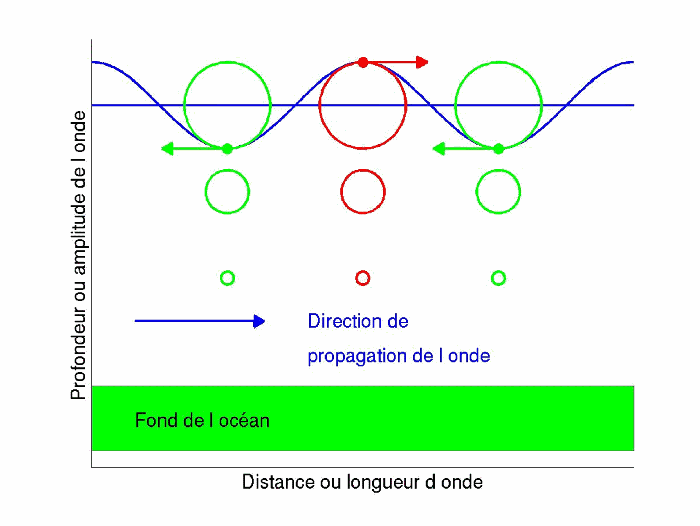
Fig. 4.16 houle#
mouvement des particules: oscillations sur un cercle (ellipse)
Attention il y a propagation d’énergie et non transport des particules !

Fig. 4.17 déferlement de vague#
Près des cotes \(c\approx\sqrt{gh}\) lorsque \(h\rightarrow0\) on \(c\nearrow\), accélération et raidissement du profil. D’où formation d’un front et déferlement
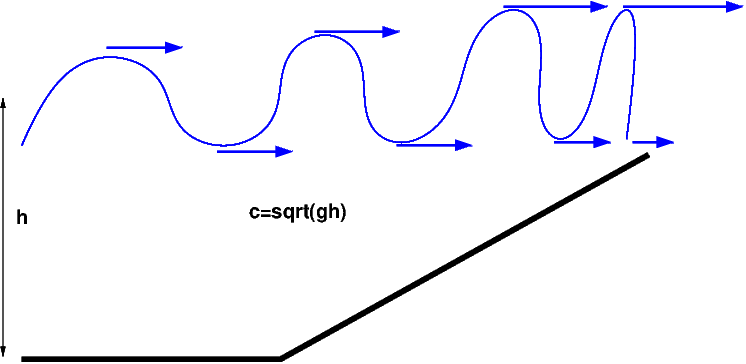
Fig. 4.18 principe du déferlement de vague#
Quand la direction des houles est oblique par rapport à la côte, donc aux isobathes (lignes d’égale profondeur), la vitesse de propagation de la houle (\(c\)) ne va pas être identique en tous points de la crête. Elle est moins rapide là où la profondeur est plus faible. Les points de la ligne de crête les plus proches du rivage vont ralentir par rapport aux points les plus éloignés et la houle va donc tourner et tendre à devenir parallèle à la côte.
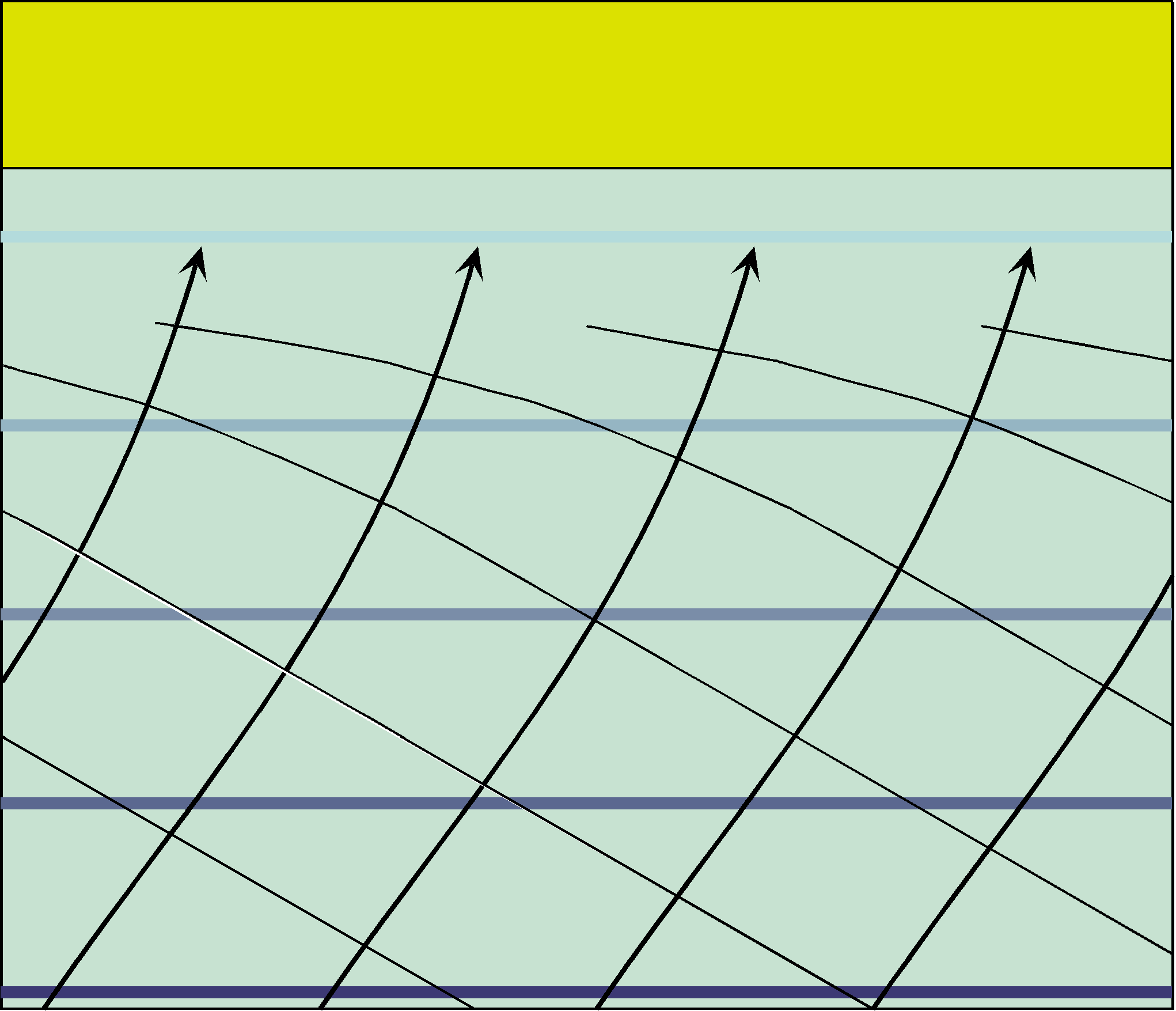
Fig. 4.19 houle sur la cote: en noir crêtes de houle, en bleu, isobathes#
Le déferlement survient lorsque la houle arrive près de la côte (phénomène de réfraction)[2]. En effet, lorsque la houle se rapproche du rivage, sa célérité ne dépend que de la profondeur locale et diminue avec cette dernière. La longueur d’onde de la houle, étant liée à la célérité diminue aussi avec la profondeur locale. Par conséquent, ces lignes de crêtes ont tendance à se resserrer près de la côte. Ainsi, la densité d’énergie par unité de surface augmente (par conservation de l’énergie), ce qui entraîne l’augmentation de la hauteur de la vague. La hauteur augmente jusqu’à une certaine limite. En effet, lorsque la hauteur atteint 0.78 fois la profondeur, la vague devient instable et déferle
la vitesse de propagation \(c\) des ondes devient fonction de la vitesse \(U\)
nombre caractéristique \(M=U/c\) analogue au nombre de Mach
phénoménes de ressaut hydraulique (analogue au choc) si \(M>1\)
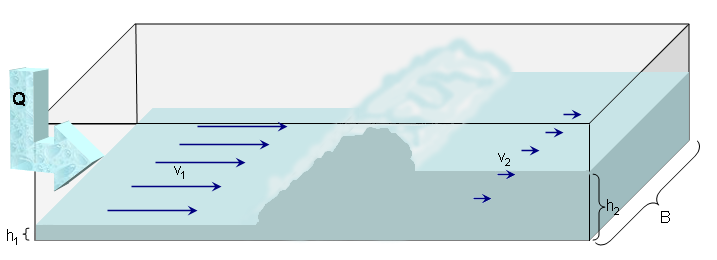
Fig. 4.20 ressaut hydraulique#
type d” écoulement suivant le nombre de Froude \(Fr=\frac{U_{0}}{\sqrt{gh_{0}}}\)
écoulement torrentiel \(Fr>1\)
écoulement fluvial \(Fr<1\)
ressaut: passage torrentiel à fluvial (avec dissipation d’énergie)

Fig. 4.21 expérience de ressaut#
accélération du fluide en 2 (sur le barrage) \(>\) vitesse critique
transition vers régime fluviale en 4 \(<\) vitesse critique
Bernoulli sur la surface libre
\[E=gh+\frac{1}{2}u^{2}=cste\]Bilan masse
\[Q=hu=cste\]comparaison de \(u\) par rapport à \(\sqrt{gh_{0}}\)

Fig. 4.22 ressaut hydraulique#

Fig. 4.23 ressaut hydraulique#
sillage de navire (dispersion d’ondes)

Fig. 4.24 sillage d’un navire#
Soliton = onde solitaire qui se propage dans les milieux non linéaires et dispersifs avec une énergie localisée dans l’espace (stable)
découvert par John Scott Russell en 1834
tsunamis, mascarets ou vagues scélérates
Fig. 4.25 Mascaret#

Fig. 4.26 Tsunami#