1.3. Vibration libre d’un treillis#
Marc BUFFAT, Département mécanique UCB Lyon 1
%matplotlib inline
import numpy as np
import scipy as sp
import matplotlib.pyplot as plt
from matplotlib import rcParams
rcParams['font.family'] = 'serif'
rcParams['font.size'] = 14
from IPython.core.display import HTML
from IPython.display import display,Image
from matplotlib import animation
#from JSAnimation import IPython_display
#css_file = 'style.css'
#HTML(open(css_file, "r").read())
1.3.1. Vibrations d’un système a 1ddl#
étude en fréquence \(f(t)=F \sin{\omega t} \)
solution \(u(t) = U \sin{\omega t}\)
raisonnance pour \(\omega = \sqrt{K/M} \)
dans ce cas la solution s’écrit
1.3.2. Modes de vibration libre#
Modèle analytique \(u(x,t)\)
Modèle discret: vecteur \(U(t)\)
modes propres de pulsation
problème aux valeurs propres généralisées \(\omega=\sqrt{\lambda}\)
matrice dimension \(2Nn \times 2Nn \) , donc \(2Nn\) valeurs propres
attention élimination des modes rigides (associés au CL en déplacement)
1.3.3. Matrice élémentaire de rigidité#
1.3.4. Matrice élementaire de Masse#
formulation EF P1 $\( Me = \frac{\rho S L }{6} \left[\begin{array}{cc} 2 & 1 \\ 1 & 2 \\ \end{array}\right] \)$
avec condensation de masse $\( Me = \frac{\rho S L }{2} \left[\begin{array}{cc} 1 & 0 \\ 0 & 1 \\ \end{array}\right] \)$
1.3.5. Equations Elements finis#
La formulation EF conduit à un système différentielle $\( M \ddot{U} + K U = 0\)$
1.3.5.1. Cas d’une barre encastrée en \(x=0\)#
avec un seul élèment \(P^1\) à 2 ddl \(U=\{u_1,u_2\}\)
La condition aux limites impose \(u_1=0\), donc un seul ddl \(u_2\)
Equation différentielle ordinaire
Solution sinusoidale \(u_2=\cos{\omega_1 t}\)
mode discret
1.3.6. Modele analytique ( 1 barre)#
avec \(c = \sqrt{\frac{E S}{\rho S}}\) et les conditions aux limites \(u_{(x=0)}=0\) et \({\frac{\partial u}{\partial x}}_{(x=L)}= 0 \)
solution variables séparées \( u(x,t)= X(x)*Y(t) \)
avec les conditions aux limites
kième mode propre
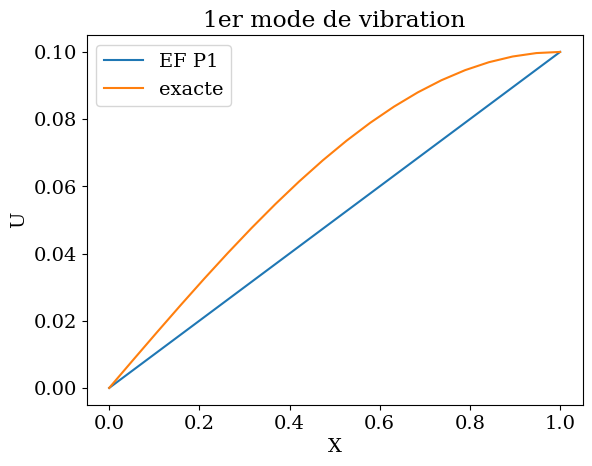
premier mode de vibration
1.3.7. Simulation numérique: mode discret#
1.3.7.1. treillis 1 barre encastré 1ddl#
solution du problème aux valeurs propres généralisées
avec
# A.N. resolution
from scipy.linalg import eig
rho=8000; S=0.05**2; L=1.0; E=2.e08;
M=np.array([[1,0,0,0],[0,1,0,0],[0,0,rho*S*L/3,0],[0,0,0,1]])
print("M=",M)
K=np.array([[1,0,0,0],[0,1,0,0],[0,0,E*S/L,0],[0,0,0,1]])
print("K=",K)
vp,UP=eig(K,M)
print("vp=",vp)
print(UP.shape)
M= [[1. 0. 0. 0. ]
[0. 1. 0. 0. ]
[0. 0. 6.66666667 0. ]
[0. 0. 0. 1. ]]
K= [[1.e+00 0.e+00 0.e+00 0.e+00]
[0.e+00 1.e+00 0.e+00 0.e+00]
[0.e+00 0.e+00 5.e+05 0.e+00]
[0.e+00 0.e+00 0.e+00 1.e+00]]
vp= [1.0e+00+0.j 1.0e+00+0.j 7.5e+04+0.j 1.0e+00+0.j]
(4, 4)
# 1 mode de vibration (3ieme)
n1=2
omega =np.sqrt(vp[n1].real)
omega1=np.sqrt(3*E*S/(rho*S*L**2))
omegae=np.pi/2*np.sqrt(E*S/(rho*S*L**2))
print("omega calcul=%g mode 1=%g exacte=%g"%(omega,omega1,omegae))
print("VP=",UP[:,n1])
omega calcul=273.861 mode 1=273.861 exacte=248.365
VP= [0. 0. 1. 0.]
U0 = 0.1
X=np.linspace(0,L,20)
Y=np.sin(np.pi*X/(2*L))
YP1 = UP[2,n1]*X
plt.plot(X,U0*YP1,'-',label='EF P1')
plt.plot(X,U0*Y,'-',label='exacte')
plt.legend(loc=0)
plt.xlabel("X")
plt.ylabel("U")
plt.title("1er mode de vibration");
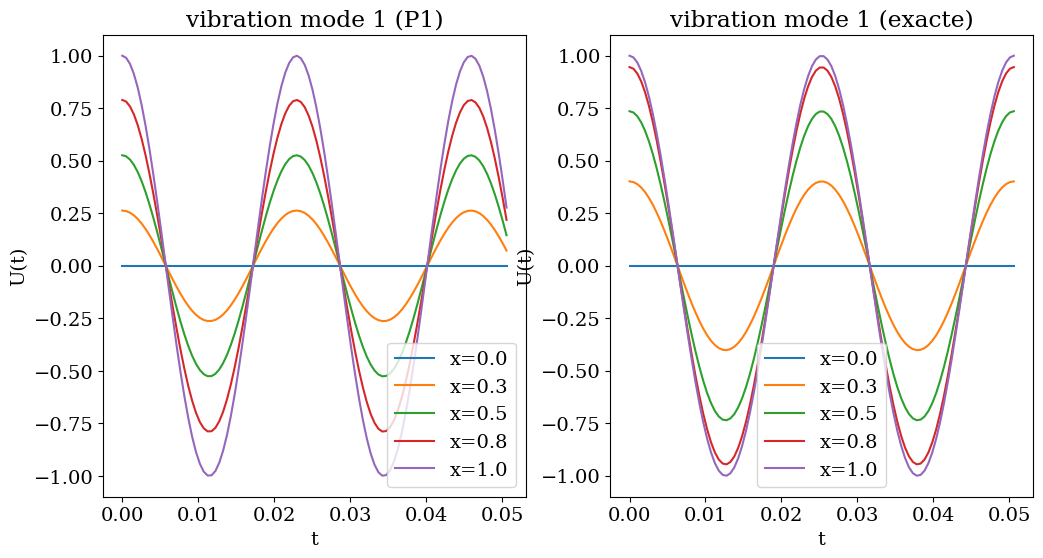
1.3.8. vibration de la barre#
I = [0,5,10,15,19]
T = np.linspace(0,4*np.pi/omegae,100)
plt.figure(figsize=(12,6))
plt.subplot(1,2,1)
for i in I:
U = YP1[i]*np.cos(omega*T)
plt.plot(T,U,label="x={:.1f}".format(X[i]))
plt.legend()
plt.xlabel("t")
plt.ylabel("U(t)")
plt.title("vibration mode 1 (P1)");
plt.subplot(1,2,2)
for i in I:
U = Y[i]*np.cos(omegae*T)
plt.plot(T,U,label="x={:.1f}".format(X[i]))
plt.legend()
plt.xlabel("t")
plt.ylabel("U(t)")
plt.title("vibration mode 1 (exacte)");
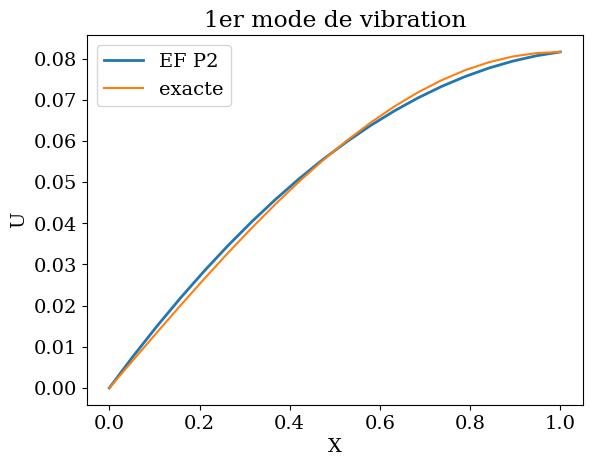
1.3.9. Avec des éléments finis \(P^2\)#
M=rho*S*L/30.*np.array([[4.,-1.,2.],[-1.,4.,2.],[2.,2.,16.]])
M[0,:]=0; M[:,0]=0; M[0,0]=1.0
print("M=",M)
K=E*S/L/3.*np.array([[7.,1.,-8.],[1.,7.,-8.],[-8.,-8.,16.]])
K[0,:]=0; K[:,0]=0; K[0,0]=1.0
print("K=",K)
vp,UP=eig(K,M)
print("vp=",vp.real)
print("VP=",UP)
M= [[ 1. 0. 0. ]
[ 0. 2.66666667 1.33333333]
[ 0. 1.33333333 10.66666667]]
K= [[ 1.00000000e+00 0.00000000e+00 0.00000000e+00]
[ 0.00000000e+00 1.16666667e+06 -1.33333333e+06]
[ 0.00000000e+00 -1.33333333e+06 2.66666667e+06]]
vp= [6.21490425e+04 8.04517624e+05 1.00000000e+00]
VP= [[-0. 0. 1. ]
[-0.81662373 0.92629644 0. ]
[-0.57717041 -0.37679557 0. ]]
omega =np.sqrt(vp[0].real)
omega1=np.sqrt(3*E*S/(rho*S*L**2))
omegae=np.pi/2*np.sqrt(E*S/(rho*S*L**2))
print(omega,omega1,omegae)
print(UP[:,0])
249.29709681020861 273.8612787525831 248.36470664490255
[-0. -0.81662373 -0.57717041]
X = np.linspace(0,L,20)
Ye = UP[1,0]*np.sin(np.pi*X/(2*L));
Y1 = UP[1,0]*2*X*(X-L/2) + UP[2,0]*4*X*(L-X)
plt.plot(X,-U0*Y1,'-',label='EF P2',lw=2)
plt.plot(X,-U0*Ye,'-',label='exacte')
plt.legend(loc=0)
plt.xlabel("X")
plt.ylabel("U")
plt.title("1er mode de vibration");
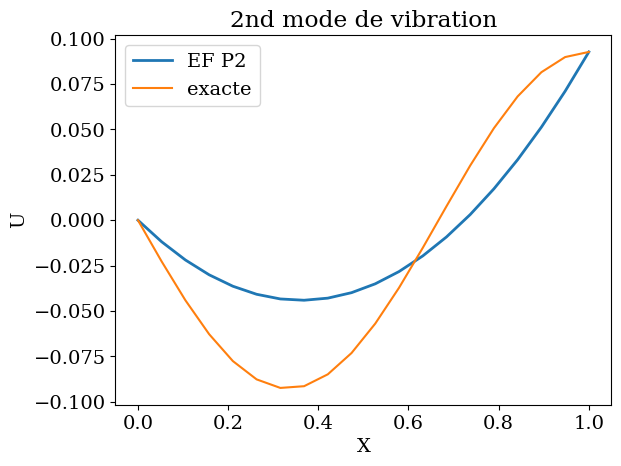
X = np.linspace(0,L,20)
Ye = -UP[1,1]*np.sin(3*np.pi*X/(2*L));
Y1 = UP[1,1]*2*X*(X-L/2) + UP[2,1]*4*X*(L-X)
plt.plot(X,U0*Y1,'-',label='EF P2',lw=2)
plt.plot(X,U0*Ye,'-',label='exacte')
plt.legend(loc=0)
plt.xlabel("X")
plt.ylabel("U")
plt.title("2nd mode de vibration");
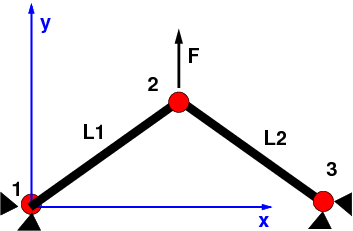
1.3.10. Application à un treillis#
import sys
from scipy import linalg
from Treillis.treillis import *
# resolution du treillis en statique
# ==================================
fichier = "Treillis/mon_treillis1.dat"
# creation du treillis
tr=lecture_treillis(fichier)
tr.E = 200*1.e9
tr.S = 0.000025
tr.rho = 8000
# CL
tr.CL[0]=3
tr.CL[3]=3
tr.FCL[5,:]=[0.,-10000]
# trace du treillis
U = np.zeros((tr.nn,2))
# Assemblage de la matrice
AA=assemblage(tr)
# second membre
BB=np.zeros((2*tr.nn))
# CLimites
A,B=climites(tr,AA,BB)
# solution
U=np.linalg.solve(A,B)
U=U.reshape((tr.nn,2))
print("Deplacement U=\n",U)
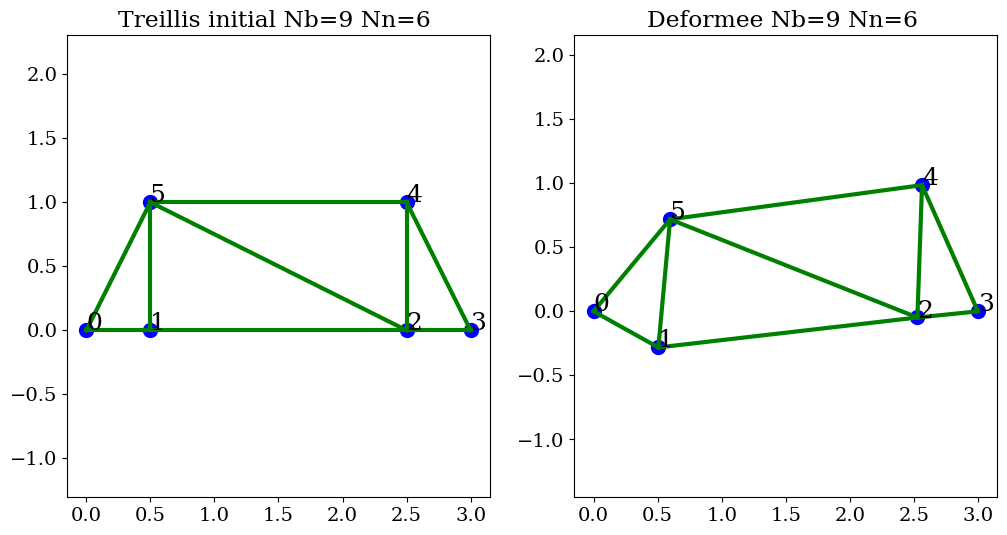
# trace de la deformee
plt.figure(figsize=(12,6))
plt.subplot(1,2,1)
trace_treillis(tr,"Treillis initial")
plt.subplot(1,2,2)
trace_treillis(tr,"Deformee",U*100)
# treillis
Treillis nn=6 nbarre=9
Deplacement U=
[[ 0.00000000e+00 0.00000000e+00]
[ 5.55555556e-05 -2.81572840e-03]
[ 2.77777778e-04 -4.79356573e-04]
[ 0.00000000e+00 0.00000000e+00]
[ 6.39648512e-04 -1.46023239e-04]
[ 9.72981846e-04 -2.81572840e-03]]
# en dynamique
AA=assemblage(tr)
# second membre
BB=np.zeros((2*tr.nn))
# CLimites
K,B=climites(tr,AA,BB)
# masse
AA=assemblage_masse(tr)
# second membre
BB=np.zeros((2*tr.nn))
# CLimites
M,B=climites(tr,AA,BB)
#
vp,VP=linalg.eig(K,b=M)
vp=np.real(vp)
ip=np.argsort(vp)
print("IP=",ip)
print("VP=",vp[np.ix_(ip)])
# elimination modes rigides (nbre CL =1,2,3)
nr = np.count_nonzero(tr.CL == 1) + np.count_nonzero(tr.CL == 2)
nr = nr + 2* np.count_nonzero(tr.CL == 3)
print("Nbre de modes rigides ",nr)
fp=np.sqrt(vp[np.ix_(ip)])/(2*np.pi)
fp=fp[nr:]
print("Frequences propres ",fp)
# tracer 1er mode
mode=nr
print("mode ",mode," f=",fp[mode-nr])
U1=VP[:,ip[mode]]/linalg.norm(VP[:,ip[mode]])
U1=U1.reshape((tr.nn,2))
print(U1)
# 2nd mode
mode=nr+1
print("mode ",mode," f=",fp[mode-nr])
U2=VP[:,ip[mode]]/linalg.norm(VP[:,ip[mode]])
U2=U2.reshape((tr.nn,2))
print(U2)
IP= [ 8 9 10 11 5 7 6 4 3 2 1 0]
VP= [1.00000000e+00 1.00000000e+00 1.00000000e+00 1.00000000e+00
4.21279762e+06 8.60886809e+06 1.51199060e+07 3.59907267e+07
5.64992030e+07 1.14988349e+08 1.80197889e+08 1.91578744e+08]
Nbre de modes rigides 4
Frequences propres [ 326.66712458 466.97449196 618.86322575 954.80665978 1196.30327744
1706.66015771 2136.46105817 2202.89497799]
mode 4 f= 326.6671245758102
[[ 0. 0. ]
[ 0.02798873 -0.27162259]
[ 0.11874315 0.05007261]
[ 0. 0. ]
[ 0.69014289 0.17466287]
[ 0.58296216 -0.24936197]]
mode 5 f= 466.97449195557914
[[ 0. 0. ]
[ 0.00407597 -0.35838175]
[ 0.01467223 -0.63312532]
[ 0. 0. ]
[-0.33725537 -0.51586325]
[ 0.02472729 -0.30002572]]
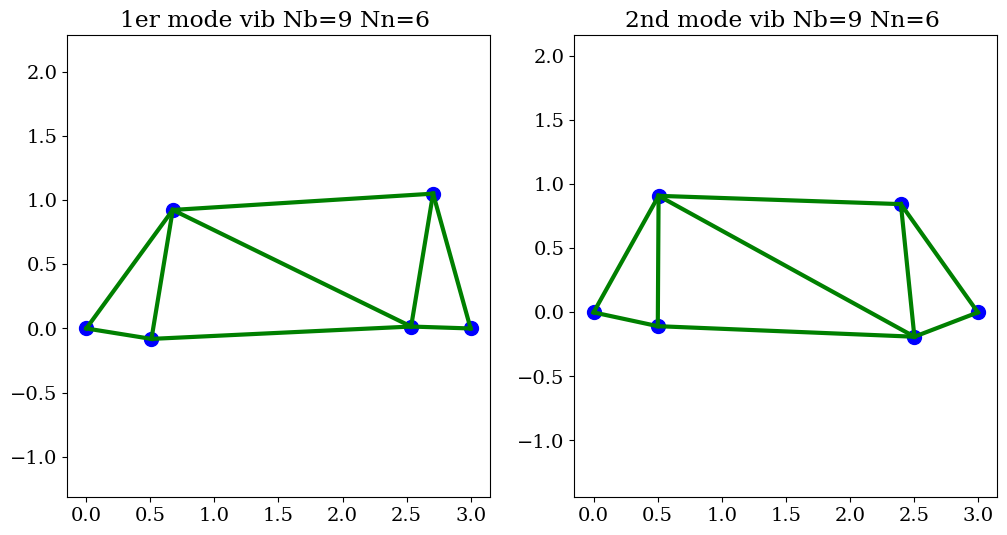
# tracer du mode
plt.figure(figsize=(12,6))
plt.subplot(1,2,1)
#trace_treillis(tr,"",U*0.0,False)
trace_treillis(tr,"1er mode vib",U1*0.3,False)
# tracer du mode
plt.subplot(1,2,2)
#trace_treillis(tr,"",U*0.0,False)
trace_treillis(tr,"2nd mode vib",U2*0.3,False)
# animation
from matplotlib import animation
from IPython.core.display import HTML
def anim(mode):
w = 2*np.pi*fp[mode]
tt=np.linspace(0,2*np.pi/w,20)
U1=VP[:,ip[mode]]/linalg.norm(VP[:,ip[mode]])
U1=U1.reshape((tr.nn,2))
# tracer
fig = plt.figure(figsize=(8,4))
ax = plt.axes()
plt.axis('equal')
plt.axis('off')
Xd = tr.X + 0.5*U1
pts, = ax.plot(Xd[:,0],Xd[:,1],'o',markersize=10,color='b')
bars = [None]*tr.ne
for i in range(tr.ne):
n1=tr.G[i,0]
n2=tr.G[i,1]
bars[i],= ax.plot([Xd[n1,0],Xd[n2,0]],[Xd[n1,1],Xd[n2,1]],'-g',lw=3)
def plot_mode(t):
U11 = U1*np.cos(w*t)
Xd = tr.X + 0.5*U11
pts.set_xdata(Xd[:,0])
pts.set_ydata(Xd[:,1])
for i in range(tr.ne):
n1=tr.G[i,0]
n2=tr.G[i,1]
bars[i].set_xdata([Xd[n1,0],Xd[n2,0]])
bars[i].set_ydata([Xd[n1,1],Xd[n2,1]])
return
an=animation.FuncAnimation(fig, plot_mode, frames=tt)
plt.title("vibration mode {} f={:.0f}hz".format(mode,fp[mode]))
plt.show()
return an
# selection mode
mode=nr+2
an = anim(mode)
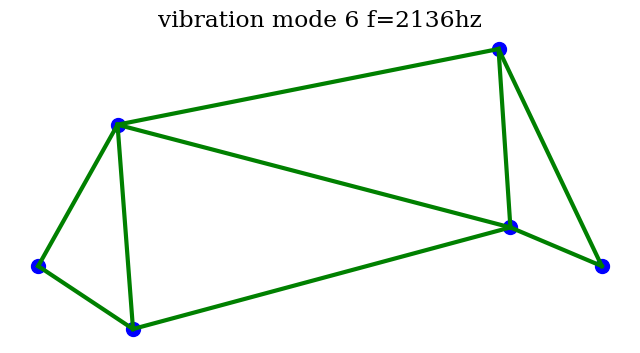
HTML(an.to_html5_video())