suivant: 2.3 Formulation faible en monter: 2. Formulation faible et précédent: 2.1 Une première approche Table des matières
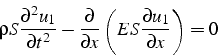
Considérons maintenant le problème de la vibration libre de la poutre encastrée précédente (figure 3.3 ). L'équation d'équilibre s'écrit:
à laquelle on ajoute les conditions aux limites:
et les conditions initiales (déformée ![]() à
à ![]() et vitesse
initiale nulle):
et vitesse
initiale nulle):
La formulation faible s'obtient comme précédemment, en multipliant
l'équation par un déplacement virtuel licite ![]() (à un
instant t fixé) et en intégrant sur tout le solide:
(à un
instant t fixé) et en intégrant sur tout le solide:

Après intégration par partie du second terme, il vient:
![\begin{displaymath}
\int_{0}^{l}\rho S\frac{\partial^{2}u_{1}}{\partial t^{2}}\d...
...[ES\frac{\partial u_{1}}{\partial x}\delta u_{1}\right]_{0}^{l}\end{displaymath}](img298.png)
En utilisant les conditions aux limites (3.9), la variation
![]() doit s'annuler en
doit s'annuler en ![]() :
:
![]() .
.
Cette formulation faible s'écrit:
Dans cette formulation faible, on a considéré une variation
![]() à un instant t donné. Cette équation traduit l'égalité à chaque instant
t du travail des forces d'accélération et des forces élastiques.
à un instant t donné. Cette équation traduit l'égalité à chaque instant
t du travail des forces d'accélération et des forces élastiques.
Pour écrire la formulation variationnelle, on considéré ce qu'il se
passe entre 2 instants: l'instant initial ![]() et un instant
et un instant ![]() .
Les 2 positions d'équilibres associées sont notées
.
Les 2 positions d'équilibres associées sont notées ![]() et
et
![]() , et on recherche quelles sont les différentes
solutions possibles
, et on recherche quelles sont les différentes
solutions possibles ![]() entre ces 2 instants. Les différentes
trajectoires (solutions) licites considérées
entre ces 2 instants. Les différentes
trajectoires (solutions) licites considérées ![]() coıncident avec
les 2 états d'équilibres à
coıncident avec
les 2 états d'équilibres à ![]() et à
et à ![]() :
:
et vérifient les liaisons ![]()
La variation entre la solution d'équilibre et une de ces trajectoires
:
![]() , vérifie donc:
, vérifie donc:
et la condition de liaison
![]() .
.
Pour obtenir la formulation variationnelle, on intègre en temps l'équation
(3.11) entre l'instant initial et l'instant ![]() :
:
En intégrant par partie la dérivée seconde en temps, il vient:
![\begin{displaymath}
\int_{0}^{\tau}\frac{\partial^{2}u_{1}}{\partial t^{2}}\delt...
...\frac{\partial u_{1}}{\partial t}\delta u_{1}\right]_{0}^{\tau}\end{displaymath}](img312.png)
Les conditions imposées sur la variation (3.13) impliquent la nullité du terme de bord, et l'équation (3.14) devient:

En notant
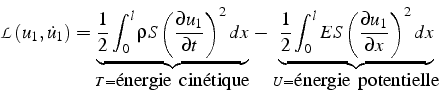
on obtiens:
Cette relation implique que la solution ![]() doit être telle que
doit être telle que
![]() soit extremum. En terme mécanique, cette intégrale représente une
action, et la fonctionnelle
soit extremum. En terme mécanique, cette intégrale représente une
action, et la fonctionnelle
![]() le Lagrangien
du système. En effet la fonctionnelle
le Lagrangien
du système. En effet la fonctionnelle
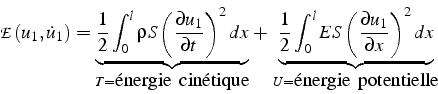
![]() est la différence entre l'énergie cinétique
est la différence entre l'énergie cinétique ![]() du solide et son
énergie potentielle élastique
du solide et son
énergie potentielle élastique ![]() . Elle représente le Lagrangien
du système, et l'équation précédente est la traduction du principe
de moindre action en mécanique:
. Elle représente le Lagrangien
du système, et l'équation précédente est la traduction du principe
de moindre action en mécanique:
“la solution d'équilibre du système ![]() est telle
que l'action
est telle
que l'action
![]() soit minimum ”.
soit minimum ”.
L'action ![]() est une fonctionnelle (i.e. est fonction d'une
fonction
est une fonctionnelle (i.e. est fonction d'une
fonction ![]() ). La condition de minimisation de
). La condition de minimisation de ![]() est donc que sa “dérivée par rapport” à
est donc que sa “dérivée par rapport” à ![]() s'annule (généralisation
de la condition d'extremum d'une fonction). La définition de la dérivée
fonctionnelle de
s'annule (généralisation
de la condition d'extremum d'une fonction). La définition de la dérivée
fonctionnelle de ![]() est une généralisation de la dérivée
d'une fonction par rapport à une variable, et est fonction de la variation
(direction de dérivation)
est une généralisation de la dérivée
d'une fonction par rapport à une variable, et est fonction de la variation
(direction de dérivation) ![]() .
.

En utilisant cette définition, et en utilisant un calcul classique de variations, la condition de minimisation de l'action conduit aux équations de Lagrange (pour un milieu continu2.2):
qui correspondent à la formulation faible (3.15), ou principe des travaux virtuels.
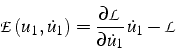
A partir de ce formalisme Lagrangien, on peut retrouver les propriétés
du système. On définit la quantité
![]() par
par
Cette quantité reste constante au cours du temps
puisque par définition de
![]()
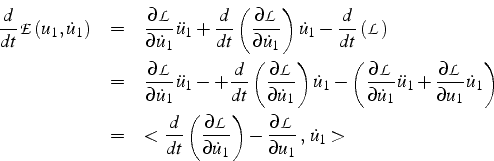
Cette dernière expression est nulle, puisque
![]() vérifie les équations de Lagrange (3.15). Cette quantité
vérifie les équations de Lagrange (3.15). Cette quantité
![]() est en faite
l'énergie totale du système:
est en faite
l'énergie totale du système:
qui se conserve au cours du temps. Pour ce système conservatif, on retrouve donc le principe de conservation de l'énergie.
La formulation variationnelle de notre problème s'écrit:

La condition de minimisation de l'action conduit aux équations de Lagrange:
qui correspondent la formulation faible (3.15), ou principe des travaux virtuels

Pour un problème dynamique en élasticité linéaire, utilisant une formulation
en déplacement
![]() , le Lagrangien s'écrit
sous la forme:
, le Lagrangien s'écrit
sous la forme:

l'énergie élastique s'écrit en fonction du déplacement sous la forme:

Les équation de Lagrange s'écrivent alors:

Dans le cas d'un problème statique:
![]() ,
le Lagrangien ne dépendant que de
,
le Lagrangien ne dépendant que de ![]() , et s'écrit ( en tenant
compte du terme de force extérieure
, et s'écrit ( en tenant
compte du terme de force extérieure ![]() ):
):

Il correspond donc à l'opposée de la fonctionnelle ![]() (3.6)
:
(3.6)
:
![]() . La formulation faible (3.5)
correspond donc bien aux équations de Lagrange à l'équilibre statique:
. La formulation faible (3.5)
correspond donc bien aux équations de Lagrange à l'équilibre statique:
Dans le cas d'un système mécanique amorti, on introduit une force
supplémentaire d'amortissement ![]() , en générale dépendant de
la vitesse
, en générale dépendant de
la vitesse ![]() . Cette force n'est pas conservative, et
on ne peut plus définir de Lagrangien
. Cette force n'est pas conservative, et
on ne peut plus définir de Lagrangien
![]() pour le système complet et écrire les équations de Lagrange (3.15).
pour le système complet et écrire les équations de Lagrange (3.15).
En revenant au principe des travaux virtuels, on calcul le travail “virtuel” de la force d'amortissement:
et en utilisant le Lagrangien précédent pour la partie conservative

on obtiens les équations de Lagrange généralisées, ou principe des travaux virtuels

Dans ce cas, on ne peut plus appliquer de principe de moindre action ou formulation variationnelle. On dispose uniquement de la formulation faible, ou principe des travaux virtuels.
Écrire la formulation faible dans le cas de vibrations forcées induites
par une force dépendant du temps ![]() appliquée en
appliquée en ![]() .
.
On pourra montrer que dans ce cas le Lagrangien s'écrit:

Écrire la formulation faible dans le cas où le système précédent est
amorti, avec un amortissement intrinsèque proportionnel à la masse.
Dans une section d'épaisseur ![]() la force d'amortissement s'écrit:
la force d'amortissement s'écrit:
Montrez que les équations de Lagrange s'écrivent: