suivant: 2.4 Formulation faible: approche monter: 2. Formulation faible et précédent: 2.2 Une seconde approche Table des matières
Considérons l'écoulement d'un fluide incompressible très visqueux
dans une cavité carrée
![]() dont la partie supérieure
est mise en mouvement (figure 3.4). Par entraınement
visqueux, le fluide se met en mouvement dans la cavité pour former
un tourbillon.
dont la partie supérieure
est mise en mouvement (figure 3.4). Par entraınement
visqueux, le fluide se met en mouvement dans la cavité pour former
un tourbillon.
En considérant le problème comme plan, les équations d'équilibre sont les équations de Stockes:
auxquels on ajoute les conditions aux limites d'adhérence aux parois:
Pour écrire la formulation faible de ce système on considère à un
instant t une variation de vitesse
![]() . Cette variation doit être licite, i.e. si on fixe la valeur de la
vitesse (condition de Dirichlet), la variation s'annule (condition
de Dirichlet homogène):
. Cette variation doit être licite, i.e. si on fixe la valeur de la
vitesse (condition de Dirichlet), la variation s'annule (condition
de Dirichlet homogène):
Les équations d'équilibre (3.17,3.18) sont la projection de l'équation vectorielle:
que nous multiplions donc scalairement par
![]() et intégrons sur le domaine
et intégrons sur le domaine ![]() pour obtenir la puissance virtuelle
des forces appliquées pour une variation
pour obtenir la puissance virtuelle
des forces appliquées pour une variation
![]() de la vitesse:
de la vitesse:
En intégrant par partie les 2 termes il vient:

En utilisant les conditions(3.20) imposées à
![]() :
:
![]() ,
les intégrales de bord s'annulent et il reste:
,
les intégrales de bord s'annulent et il reste:
Si on impose de plus à la variation
![]() d'être incompressible:
d'être incompressible:
![]() ,
on obtiens une première formulation faible du problème:
,
on obtiens une première formulation faible du problème:
L'équation intégrale projetée sur les 2 axes ![]() s'écrit aussi:
s'écrit aussi:
Cette formulation faible traduit le fait que la somme des puissances
des forces visqueuses doit être nulle pour toute variation de vitesse
![]() licite et incompressible
. On constate que la pression n'intervient plus dans cette formulation,
puisque que la puissance des forces de pression est automatiquement
nulle pour une variation de vitesse
licite et incompressible
. On constate que la pression n'intervient plus dans cette formulation,
puisque que la puissance des forces de pression est automatiquement
nulle pour une variation de vitesse
![]() licite et incompressible. On retrouve l'interprétation classique
du champ de pression dans un écoulement de fluide incompressible:
la pression
licite et incompressible. On retrouve l'interprétation classique
du champ de pression dans un écoulement de fluide incompressible:
la pression ![]() sert à maintenir le champ de vitesse incompressible
( i.e.
sert à maintenir le champ de vitesse incompressible
( i.e.
![]() ). Dans la formulation
variationnelle (3.22), on impose au champ de vitesse
et à sa variation de rester incompressible, et donc on élimine la
pression du problème. On constate que l'élimination de la pression
a aussi découplée les équations de vitesse. Attention cependant, ce
découplage n'est que relatif, puisque la condition d'incompressibilité
couple les composantes de vitesse.
). Dans la formulation
variationnelle (3.22), on impose au champ de vitesse
et à sa variation de rester incompressible, et donc on élimine la
pression du problème. On constate que l'élimination de la pression
a aussi découplée les équations de vitesse. Attention cependant, ce
découplage n'est que relatif, puisque la condition d'incompressibilité
couple les composantes de vitesse.
Cette formulation faible découle d'un problème variationnelle, puisque pour ce problème on peut définir un Lagrangien:

Le champ de vitesse solution minimise ce Lagrangien
![]() ,
qui n'est autre que l'énergie dissipée sous forme visqueuse. La solution
du problème de Stokes (3.16,3.17,3.18)
est donc le champ de vitesse incompressible vérifiant les conditions
aux limites (3.19) qui minimise la dissipation visqueuse.
,
qui n'est autre que l'énergie dissipée sous forme visqueuse. La solution
du problème de Stokes (3.16,3.17,3.18)
est donc le champ de vitesse incompressible vérifiant les conditions
aux limites (3.19) qui minimise la dissipation visqueuse.
La formulation faible correspond alors aux équations de Lagrange:
Si on n'impose pas à la variation du champ de vitesse d'être incompressible,
la formulation intégrale (3.21) contient un terme de
pression ![]() . Il faut donc tenir compte d'une variation
. Il faut donc tenir compte d'une variation ![]() de
ce champ de pression, qui doit être tel que le champ de vitesse
de
ce champ de pression, qui doit être tel que le champ de vitesse
![]() reste incompressible . Il faut donc multiplier l'équation (3.16)
(qui est la condition d'incompressibilité
reste incompressible . Il faut donc multiplier l'équation (3.16)
(qui est la condition d'incompressibilité
![]() )
par
)
par ![]() et intégrer sur le domaine:
et intégrer sur le domaine:
On remarque que c'est le terme symétrique de l'intégrale de pression
dans (3.21), et qui traduit le fait que la puissance
de toute variation de pression ![]() calculée pour le champ de
vitesse
calculée pour le champ de
vitesse
![]() doit être nulle.
doit être nulle.
La formulation faible de (3.16,3.17,3.18) s'écrit donc
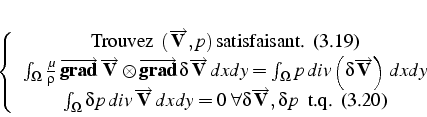
Cette formulation correspond aussi à un problème variationnel dont le Lagrangien s'écrit:

et les équations de Lagrange:
Dans le Lagrangien, on remarque que la contrainte
![]() est multipliée par la pression. La pression apparaıt donc comme le
multiplicateur de Lagrange de la contrainte d'incompressibilité.
est multipliée par la pression. La pression apparaıt donc comme le
multiplicateur de Lagrange de la contrainte d'incompressibilité.
Dans la pratique, nous utiliserons plutôt la seconde formulation dans laquelle la contrainte est imposée explicitement à travers la pression, car elle est en générale plus simple à approximer numériquement. Cependant certaines méthodes numériques utilisent la première formulation.
Pour le problème de Navier-Stockes avec des termes instationnaires, on applique le principe des puissances virtuelles pour obtenir la formulation faible des équations. Par contre, cette formulation n'est plus associée à une formulation variationnelle, puisque que l'on ne peut pas définir de Lagrangien.
![\includegraphics[scale=0.6]{CHAP2/cavite}](img356.png)