suivant: 1.5 Étude de la monter: 1. Une première approche précédent: 1.3 Recherche de solution Table des matières
Pour trouver une solution approchée du problème
![]() ou
ou
![]() ,
nous allons construire une approximation par différences finies de
l'équation de la chaleur (1.1).
,
nous allons construire une approximation par différences finies de
l'équation de la chaleur (1.1).
Pour cela, le domaine de calcul
![]() est divisé en
est divisé en
![]() intervalles,
chacun de longueur
intervalles,
chacun de longueur
![]() . Pour calculer la solution
sur un temps
. Pour calculer la solution
sur un temps
![]() , on découpe l'intervalle
, on découpe l'intervalle
![]() avec un
pas
avec un
pas
![]() . On calcul alors la solution approchée
. On calcul alors la solution approchée
![]() sur
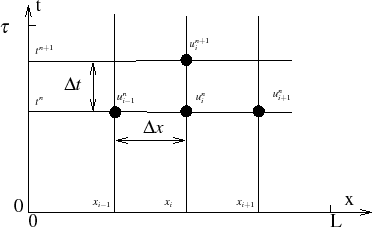
un maillage où chaque point d'indice
sur
un maillage où chaque point d'indice
![]()
![]() est
repéré sur l'axe
est
repéré sur l'axe
![]() par sa position
par sa position
![]() et sur l'axe
et sur l'axe
![]() par
par
![]() comme le montre la figure 1.4
comme le montre la figure 1.4
La solution approchée aux noeuds du maillage sera notée:
Pour approximer l'équation (1.1), nous allons chercher une
approximation de la dérivée première en temps
![]() et de la dérivée seconde en espace
et de la dérivée seconde en espace
![]()
L'idée de base de la méthode des différences finies peut être décrite
en partant de la définition de la dérivée première
![]() au point
au point
![]() et à l'instant
et à l'instant
![]() :
:
Si la fonction
![]() est régulière, on peut construire,
à partir de cette relation (1.23), une approximation “raisonnable”
de
est régulière, on peut construire,
à partir de cette relation (1.23), une approximation “raisonnable”
de
![]() si
si
![]() est suffisamment
petit.
est suffisamment
petit.
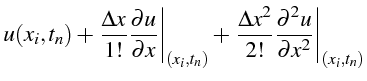
Pour préciser cette approximation, nous utiliserons le développement
en série de Taylor de
![]() autour du point
autour du point
![]() à l'ordre m:
à l'ordre m:
où
![]() est un point dans l'intervalle
est un point dans l'intervalle
![]() .
Le dernier terme de ce développement peut être identifié à un reste
d'ordre
.
Le dernier terme de ce développement peut être identifié à un reste
d'ordre
![]() . En utilisant ce développement à l'ordre
. En utilisant ce développement à l'ordre
![]() , nous pouvons en déduire l'approximation par différences finies
de la dérivée première:
, nous pouvons en déduire l'approximation par différences finies
de la dérivée première:
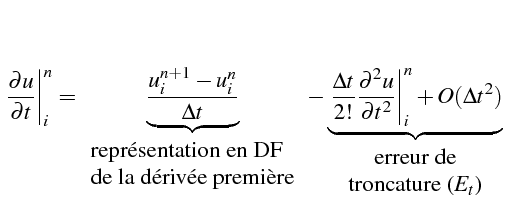
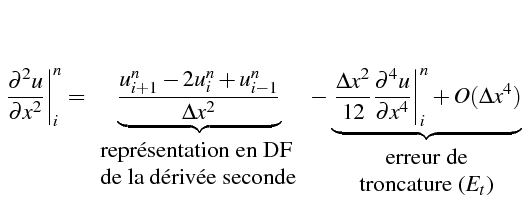
Dans le second membre de cette équation, on retrouve l'approximation
par différences finies (1.24) plus un terme qui représente
l'erreur liée à cette approximation, que l'on appelle erreur de troncature
(
![]() ). En passant à une notation
). En passant à une notation
![]() nous pouvons
écrire :
nous pouvons
écrire :
que l'on notera:
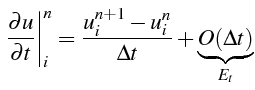
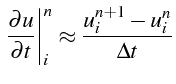
On obtiens ainsi une approximation de la dérivée première
![]() par différences finies à l'ordre 1:
par différences finies à l'ordre 1:
L'erreur d'approximation de la dérivée première
![]() par la formule de différences finies (1.29) est une approximation
d'ordre 1 en
par la formule de différences finies (1.29) est une approximation
d'ordre 1 en
![]() , ce qu'indique la notation
, ce qu'indique la notation
![]() . Cette notation implique que
. Cette notation implique que
![]() pour
pour
![]() .
.
Remarque : La notation
![]() ne
nous indique pas le comportement exact de la solution (la dérivée
première dans ce cas), mais seulement la tendance lorsque
ne
nous indique pas le comportement exact de la solution (la dérivée
première dans ce cas), mais seulement la tendance lorsque
![]()
D'autres représentations de la dérivée première peuvent être obtenues à partir de développements en série de Taylor. C'est ce que nous étudierons dans le chapitre suivant.
Pour calculer l'approximation de la dérivée seconde, nous allons utiliser
deux développements en série de Taylor de
![]() au voisinage de
au voisinage de
![]() :
:
que l'on note aussi:
ce qui fournit l'approximation de la dérivée seconde
![]() par différences finies à l'ordre 2:
par différences finies à l'ordre 2:
En remplaçant dans l'équation (1.1), la dérivée première en temps par son approximation par différences finies (1.29) et la dérivée seconde en espace par son approximation par différences finies (1.33), on obtient le schéma aux différences finies explicite:
|
|
qui s'écrit:
en notant
La relation (1.35) permet de calculer explicitement la solution
au temps
![]() en fonction de la solution au temps
en fonction de la solution au temps
![]() aux noeuds
aux noeuds
![]() du maillage, sauf pour les 2 noeuds extrémités
du maillage, sauf pour les 2 noeuds extrémités
![]() et
et
![]() . Pour ces deux noeuds, on utilise les conditions
aux limites de
. Pour ces deux noeuds, on utilise les conditions
aux limites de
![]() :
:
 |
|||
 |
 |
Nous pouvons des à présent effectuer une simulation numérique en utilisant un tableur de type Excel. Pour cela on utilise un tableau de 5 colonnes et de 10 lignes, dont les cases sont repérées par des lettres pour les colonnes et des chiffres pour les lignes:
| A1 | B1 | C1 | D1 | E1
A2 |
Le principe d'un tableur est de permettre des calculs en utilisant des relations entre les cases voisines qui, lorsque l'on les duplique ,sont automatiquement décalées (notation relative).
On choisit les paramètres du problème
![]() et on discrétise le domaine
et on discrétise le domaine
![]() en
en
![]() intervalles. La valeur
du paramètre
intervalles. La valeur
du paramètre
![]() est choisie égale à
est choisie égale à
![]() .
.
Sur la première ligne du tableur (A1-E1), on rentre les coordonnées
des
![]() points de maillage, et sur la deuxième ligne la condition
initiale dans la colonne A avec la formule A2=sin(PI()*A1)
, que l'on duplique dans les colonnes C à E. Sur la troisième ligne
on calcule la solution au premier pas en temps
points de maillage, et sur la deuxième ligne la condition
initiale dans la colonne A avec la formule A2=sin(PI()*A1)
, que l'on duplique dans les colonnes C à E. Sur la troisième ligne
on calcule la solution au premier pas en temps
![]() en utilisant
la formule déduite du schéma différences finies (1.35): B3=B2+0,2*(A2-2*B2+C2)
pour la colonne B que l'on duplique dans les colonnes C à D. Pour
les colonnes A et E on applique les conditions aux limites: A3=0 et E3=0
. Pour obtenir la solution aux pas en temps suivant, on duplique simplement
les formules de la ligne 3 dans les lignes suivantes.
en utilisant
la formule déduite du schéma différences finies (1.35): B3=B2+0,2*(A2-2*B2+C2)
pour la colonne B que l'on duplique dans les colonnes C à D. Pour
les colonnes A et E on applique les conditions aux limites: A3=0 et E3=0
. Pour obtenir la solution aux pas en temps suivant, on duplique simplement
les formules de la ligne 3 dans les lignes suivantes.
Le résultat des formules utilisées dans ce tableur est donnée dans le tableau ci-dessous:
| 0 | 1/4 | 1/2 | 3/4 | 1
sin(PI()*A1) |
On obtient ainsi un tableau de valeurs qui fournit par ligne la solution
numérique aux différents pas en temps. Le tableau (1.1)
donne la valeur numérique de la solution calculée avec
![]() sur
sur
![]() pas en temps.
pas en temps.
Pour comparaison, on a donné la valeur de la solution exacte
![]() aux mêmes points de maillage et aux mêmes instants dans le tableau
(1.2). En comparant les valeurs des deux tableaux, on constate
que la solution par différences finies approxime bien la solution
exacte (précision de 2 chiffres après la virgule).
aux mêmes points de maillage et aux mêmes instants dans le tableau
(1.2). En comparant les valeurs des deux tableaux, on constate
que la solution par différences finies approxime bien la solution
exacte (précision de 2 chiffres après la virgule).
|
Par contre, si on refait le même calcul, mais avec une valeur de
![]() plus grande, par exemple
plus grande, par exemple
![]() on obtient le résultat donné dans
le tableau (1.3).
on obtient le résultat donné dans
le tableau (1.3).
|
On constate que pour cette valeur de
![]() , la solution numérique diverge
avec des valeurs
, la solution numérique diverge
avec des valeurs
![]() de plus en plus grandes. De ces essais
numériques, on peut en déduire que pour les petites valeurs de
de plus en plus grandes. De ces essais
numériques, on peut en déduire que pour les petites valeurs de
![]() ,
la solution numérique converge vers la solution exacte, mais que pour
les grandes valeurs de
,
la solution numérique converge vers la solution exacte, mais que pour
les grandes valeurs de
![]() la solution numérique diverge.
la solution numérique diverge.
Cette approche expérimentale est démonstrative et empirique. Une approche systèmatique consiste à faire une analyse numérique des schémas aux différences finies pour connaître à priori les conditions de convergence et les propriétés de la solution numérique.