suivant: 8. Intégration numérique monter: 7. Meilleure approximation précédent: 7.1 Introduction Table des matières
Ce polynôme p(x) est appelée l'approximation au sens des moindres carrés discrets de f .
Soient N+1 points distincts ![]() , on veut déterminer les n+1 coefficients
, on veut déterminer les n+1 coefficients
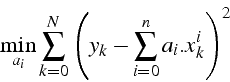
![]() minimisant l'erreur :
minimisant l'erreur :

![]() est une forme quadratique en
est une forme quadratique en ![]() , et son minimum
est atteint pour :
, et son minimum
est atteint pour :
On obtient un système linéaire d'ordre n+1 :
![\begin{displaymath}
A=\left[\begin{array}{cccc}
N+1 & \sum_{k=0}^{N}x_{k} & \ldo...
...{k}^{n+1} & \ldots & \sum_{k=0}^{N}x_{k}^{2n}\end{array}\right]\end{displaymath}](img413.png)
![\begin{displaymath}
B=\left[\begin{array}{c}
\sum_{k=0}^{N}y_{k}\\
\sum_{k=0}^{...
...{k}\\
\vdots\\
\sum_{k=0}^{N}x_{k}^{n}y_{k}\end{array}\right]\end{displaymath}](img414.png)
![\begin{displaymath}
X=\left[\begin{array}{c}
a_{0}\\
a_{1}\\
\vdots\\
a_{n}\end{array}\right]\end{displaymath}](img415.png)
Cette équation est ``l'équation normale''
Approximation
![]()
![]() ``équation normale''
``équation normale''
![\begin{displaymath}
A=\left[\begin{array}{cc}
N+1 & \sum_{k=0}^{N}x_{k}\\
\sum_{k=0}^{N}x_{k} & \sum_{k=0}^{N}x_{k}^{2}\end{array}\right]\end{displaymath}](img418.png)
![\begin{displaymath}
B=\left[\begin{array}{c}
\sum_{k=0}^{N}y_{k}\\
\sum_{k=0}^{N}x_{k}y_{k}\end{array}\right]\end{displaymath}](img419.png)
![\begin{displaymath}
X=\left[\begin{array}{c}
a_{0}\\
a_{1}\end{array}\right]\end{displaymath}](img420.png)
en introduisant la moyenne des ![]() et
et ![]()
la covariance et la variance