suivant: 4.2 Formulation éléments finis monter: 4. Éléments finis hermitiens précédent: 4. Éléments finis hermitiens Table des matières
On considère une poutre en flexion de longueur L, encastrée en ![]() et soumise à une force de flexion
et soumise à une force de flexion ![]() en
en ![]() .
.
![\includegraphics[width=0.7\textwidth]{CHAP31/poutre}](img924.png)
On note ![]() le déplacement transverse,
le déplacement transverse, ![]() la masse volumique
,
la masse volumique
, ![]() la section de la poutre,
la section de la poutre, ![]() le module d'Young,
le module d'Young, ![]() l'inertie de la section suivant z (perpendiculaire au plan). Avec
l'hypothèse d'Euler Bernouilli (un plan normal à la ligne centrale
reste normal à cette ligne après déformation), l'angle
l'inertie de la section suivant z (perpendiculaire au plan). Avec
l'hypothèse d'Euler Bernouilli (un plan normal à la ligne centrale
reste normal à cette ligne après déformation), l'angle ![]() de rotation du plan (suivant z) s'écrit:
de rotation du plan (suivant z) s'écrit:
Dans une section, la résultante des contraintes est un torseur, qui
comprend la résultante des contraintes de cisaillement
![]() et le moment fléchissant (moment des contraintes normales)
et le moment fléchissant (moment des contraintes normales)
![]() . L'équation d'équilibre résulte de l'équilibre du torseur des forces
dans une section:
. L'équation d'équilibre résulte de l'équilibre du torseur des forces
dans une section:
et s'écrit, en notant ![]() la force linéique appliquée dans
une section:
la force linéique appliquée dans
une section:
Les conditions aux limites sont des conditions d'encastrement en ![]()
et des conditions dynamiques de force et de moment appliqués en ![]()
Pour obtenir la formulation faible, on applique le théorème des travaux
virtuels en calculant le travail du système pour un déplacement virtuel
licite ![]() (variation du déplacement
(variation du déplacement ![]() ). On obtiens:
). On obtiens:
On intégre 2 fois par parties pour symétriser le problème et faire apparaıtre les conditions aux limites:
![\begin{displaymath}
\int_{0}^{L}EI_{zz}\frac{d^{2}v}{dx^{2}}\frac{d^{2}w}{dx^{2}...
...\frac{d^{2}w}{dx^{2}}\frac{dw}{dx}]_{0}^{L}=\int_{0}^{L}qw dx\end{displaymath}](img935.png)
Le déplacement virtuel ![]() est une variation de
est une variation de ![]() , et doit donc
vérifier les liaisons imposées en
, et doit donc
vérifier les liaisons imposées en ![]() (5.2), i.e:
(5.2), i.e:
Les conditions aux limites (5.3) s'écrivent en fonction
de ![]() :
:
ce qui permet de calculer les intégrales de bord
![\begin{displaymath}[EI_{zz}\frac{d^{3}v}{dx^{3}}w-EI_{zz}\frac{d^{2}w}{dx^{2}}\frac{dw}{dx}]_{0}^{L}=-Fw(L)\end{displaymath}](img938.png)
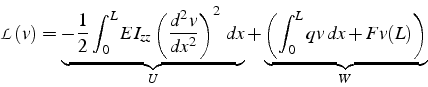
La formulation faible s'écrit:

Cette formulation faible traduit l'équilibre entre le travail des forces élastiques internes et le travail des forces appliquées. Le travail des forces internes dérive d'un potentiel élastique, et cette formulation faible possède donc un Lagrangien:
qui correspond à la somme de l'énergie potentielle élastique ![]() et du travail
et du travail ![]() des forces extérieures pour le déplacement
des forces extérieures pour le déplacement ![]() .
La formulation variationnelle corresponds donc à rendre stationnaire
(maximum dans notre cas) de ce Lagrangien:
.
La formulation variationnelle corresponds donc à rendre stationnaire
(maximum dans notre cas) de ce Lagrangien:
et la condition de stationnarité conduit aux équations de Lagrange
En utilisant la même remarque de dans le chapitre précédent, on peut
déterminer la valeur de l'énergie élastique ![]() à l'équilibre, en
choisissant dans la formulation faible comme variation
à l'équilibre, en
choisissant dans la formulation faible comme variation ![]() le déplacement
réel
le déplacement
réel ![]() .
.

C'est le travail moyen fournit par les forces extérieures pour passer
de l'état naturel (sans contrainte) à l'état d'équilibre contraint
en augmentant progressivement les forces extérieures de ![]() à leurs
valeurs finales. C'est ce travail fourni par les forces extérieures
qui est transformé en énergie élastique. On constate aussi que dans
le Lagrangien, le terme de travail des forces extérieures ne correspond
pas au travail fournit, mais à un travail virtuel associé au déplacement
à leurs
valeurs finales. C'est ce travail fourni par les forces extérieures
qui est transformé en énergie élastique. On constate aussi que dans
le Lagrangien, le terme de travail des forces extérieures ne correspond
pas au travail fournit, mais à un travail virtuel associé au déplacement
![]() (dans ce cas le travail fournit est en fait égal à la moitié
de cette valeur).
(dans ce cas le travail fournit est en fait égal à la moitié
de cette valeur).
La valeur minimum du Lagrangien est égale à l'énergie potentiel élastique
![]() :
: