Modèles d’équations January 1, 2012
A partir des équations générales de la mécanique des fluides d’un écoulement monophasique, on va passer en revu différents modèles classiques d’équations en mécanique des fluide, en
Opérateurs:
Pour obtenir ces équations, on utilise les propriétés d’analyse vectorielle suivantes:
d i v ( g r a d → u ) = Δ u , r o t → ( g r a d → u ) = 0 div(\overrightarrow{grad}\,u)=\Delta u,\,\,\,\,\overrightarrow{rot}(\overrightarrow{grad}\,u)=0 d i v ( g r a d u ) = Δ u , ro t ( g r a d u ) = 0 r o t → ( U → ⊗ g r a d ‾ ‾ U → ) = U → ⊗ g r a d ‾ ‾ ( r o t → ( U → ) ) + r o t ( U → ) ∗ d i v ( U → ) \overrightarrow{rot}(\overrightarrow{U}\otimes\overline{\overline{grad}}\,\overrightarrow{U})=\overrightarrow{U}\otimes\overline{\overline{grad}}(\overrightarrow{rot}(\overrightarrow{U}))+rot(\overrightarrow{U})*div(\overrightarrow{U}) ro t ( U ⊗ g r a d U ) = U ⊗ g r a d ( ro t ( U )) + ro t ( U ) ∗ d i v ( U ) Écoulement de Stokes ¶ cas limite R e → 0 Re \rightarrow 0 R e → 0
Modèle écoulement incompressible visqueux de Stokes
(p = p ′ + P 0 p=p'+P_{0} p = p ′ + P 0
d i v U → = 0 − g r a d → ( p ′ ) + μ Δ U → = 0 \begin{aligned}
div\,\overrightarrow{U} & =0\\
-\overrightarrow{grad}\left(p^{'}\right)+\mu\Delta\overrightarrow{U} & =0\end{aligned} d i v U − g r a d ( p ′ ) + μ Δ U = 0 = 0 exemple : écoulement d’huile dans un tuyau horizontal L = 0.15 m L=0.15m L = 0.15 m R = 2 m m R=2mm R = 2 mm Q = 0.02 l / m i n Q=0.02\,l/min Q = 0.02 l / min U 0 = 0.03 m / s ) U_{0}=0.03m/s) U 0 = 0.03 m / s )
huile moteur liquide incompressible: ρ = 860 k g / m 3 \rho=860\,kg/m^{3} ρ = 860 k g / m 3 μ = 0.2 P a . s \mu=0.2\,Pa.s μ = 0.2 P a . s
Figure 1: écoulement d’huile
Fluide parfait incompressible ¶ cas limite R e = ∞ Re=\infty R e = ∞ M a ≪ 1 Ma\ll1 M a ≪ 1
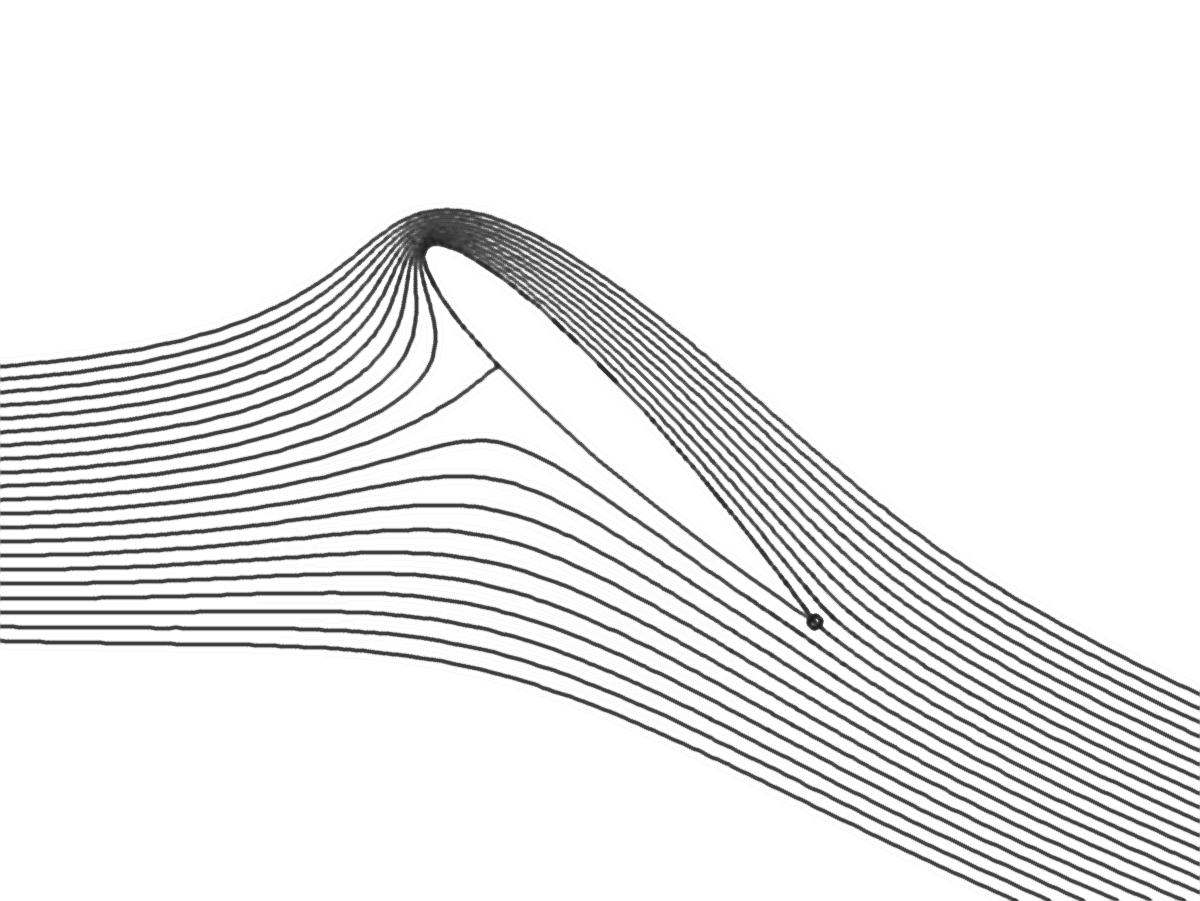
Modèle écoulement fluide parfait incompressible
d i v U → = 0 D U → D t = − ∇ → ( p ρ + g z ) \begin{aligned}
div\,\overrightarrow{U} & =0\\
\frac{D\overrightarrow{U}}{Dt}& =-\overrightarrow{\nabla}(\frac{p}{\rho}+gz)
\end{aligned} d i v U D t D U = 0 = − ∇ ( ρ p + g z ) Figure 2: écoulement autour d’un profil d’aile
Pour un champ de vitesse U → \overrightarrow{U} U Γ \Gamma Γ C C C
Γ = ∮ c U → . d l → \Gamma=\oint_{c}\overrightarrow{U}.\overrightarrow{dl} Γ = ∮ c U . d l En utilisant le théoréme du rotationnel, Γ \Gamma Γ S S S C C C
Γ = ∬ S r o t U → . n → d s \Gamma = \iint_{S}rot\overrightarrow{U}.\overrightarrow{n}\,ds Γ = ∬ S ro t U . n d s En prenant le rotationnel de l’équation de bilan de quantité de mouvement et
en notant que r o t → ( g r a d → ( ) ) = 0 \overrightarrow{rot}(\overrightarrow{grad}(\;))=0 ro t ( g r a d ( )) = 0
théorème de Kelvin : pour un fluide parfait incompressible, on a conservation de la circulation le long de tout contour fermé
D Γ D t = 0 ⟺ D D t ( ∬ S r o t u → . n → d s ) = 0 \frac{D\Gamma}{Dt}=0\Longleftrightarrow\frac{D}{Dt}\left(\iint_{S}rot\overrightarrow{u}.\overrightarrow{n}\,ds\right)=0 D t D Γ = 0 ⟺ D t D ( ∬ S ro t u . n d s ) = 0 On en déduit qu’un fluide parfait irrotationnelle à t = 0 t=0 t = 0 ω → = r o t u → = 0 → \overrightarrow{\omega}=rot\overrightarrow{u}=\overrightarrow{0} ω = ro t u = 0
Un champ de vitesse irrotationnel découle d’un potentiel
r o t U → = 0 ⟹ U → = g r a d → ( Φ ) rot\overrightarrow{U}=0\,\Longrightarrow\overrightarrow{U}=\overrightarrow{grad}(\Phi) ro t U = 0 ⟹ U = g r a d ( Φ ) ce qui pour un fluide incompressible conduit à
d i v U → = 0 ⟹ Δ Φ = 0 div\overrightarrow{U}=0\,\Longrightarrow\Delta\Phi=0 d i v U = 0 ⟹ ΔΦ = 0 Modèle d’écoulement potentiel
L’écoulement d’un fluide parfait incompressible irrotationnel est un écoulement potentiel solution de
En 2D, on peut remplacer le potentiel ϕ \phi ϕ ψ \psi ψ
On peut alors étudier les écoulements potentiels en 2D en utilisant les outils de l’analyse complexe en introduisant le potentiel complexe Ψ ( z ) = ϕ ( x , y ) + i ψ ( x , y ) \Psi(z) = \phi(x,y) +i \, \psi(x,y) Ψ ( z ) = ϕ ( x , y ) + i ψ ( x , y )
Mais attention aux conditions aux limites!!
Écoulement incompressible isotherme ¶ cas R e ≫ 1 Re\gg 1 R e ≫ 1 M a ≪ 1 Ma\ll 1 M a ≪ 1
Équations classiques de Navier-Stokes
Écoulement incompressible avec effet de gravité ¶ d i v U → = 0 ρ 0 ∂ U → ∂ t + ρ 0 U → . g r a d → U → = − g r a d → ( p ′ + ρ 0 g z ) + μ Δ U → \begin{aligned}
div\,\overrightarrow{U} & =0\\
\rho_{0}\frac{\partial\overrightarrow{U}}{\partial t}+\rho_{0}\overrightarrow{U}.\overrightarrow{grad}\,\overrightarrow{U} & =-\overrightarrow{grad}\left(p'+\rho_{0}gz\right)+\mu\Delta\overrightarrow{U}\end{aligned} d i v U ρ 0 ∂ t ∂ U + ρ 0 U . g r a d U = 0 = − g r a d ( p ′ + ρ 0 g z ) + μ Δ U **exemple ** écoulement d’eau dans conduite forcée de diamètre D = 1 m D=1m D = 1 m L = 85 m L=85m L = 85 m Q = 3 m 3 / s Q=3\,m^{3}/s Q = 3 m 3 / s U 0 = 3.8 m / s ) U_{0}=3.8\,m/s) U 0 = 3.8 m / s )
eau liquide incompressible : ρ = 1000 k g / m 3 \rho=1000\,kg/m^{3} ρ = 1000 k g / m 3 μ = 1 0 − 3 P a . s \mu=10^{-3}\,Pa.s μ = 1 0 − 3 P a . s
R e = 3.8 1 0 6 , F r = 0.13 Re=3.8\,10^{6},\,\,Fr=0.13 R e = 3.8 1 0 6 , F r = 0.13
Figure 3: écoulement dans une conduite forcée
Écoulement incompressible de Navier-Stokes ¶ En notant ν = μ / ρ 0 \nu=\mu/\rho_{0} ν = μ / ρ 0
d i v U → = 0 ∂ U → ∂ t + U → . g r a d → U → = − g r a d → p ′ + ν Δ U → \begin{aligned}
div\,\overrightarrow{U} & =0\\
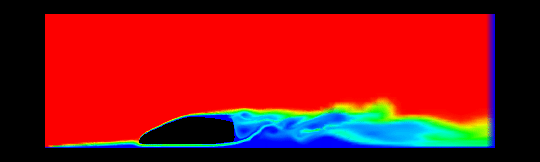
\frac{\partial\overrightarrow{U}}{\partial t}+\overrightarrow{U}.\overrightarrow{grad}\,\overrightarrow{U} & =-\overrightarrow{grad}p'+\nu\Delta\overrightarrow{U}\end{aligned} d i v U ∂ t ∂ U + U . g r a d U = 0 = − g r a d p ′ + ν Δ U **exemple **: écoulement d’air autour d’une voiture à
90 k m / h 90km/h 90 km / h ( U 0 = 25 m / s ) (U_{0}=25\,m/s) ( U 0 = 25 m / s ) H = 1.5 m H=1.5m H = 1.5 m
fluide air: ρ = 1 k g / m 3 \rho=1kg/m^{3} ρ = 1 k g / m 3 μ = 15 1 0 − 6 P a . s \mu=15\,10^{-6}\,Pa.s μ = 15 1 0 − 6 P a . s c 0 = 330 m / s c_{0}=330\,m/s c 0 = 330 m / s
R e = 2.5 1 0 6 Re=2.5\,10^{6} R e = 2.5 1 0 6 M a = 0.07 Ma=0.07 M a = 0.07
Figure 4: écoulement autour d’une voiture
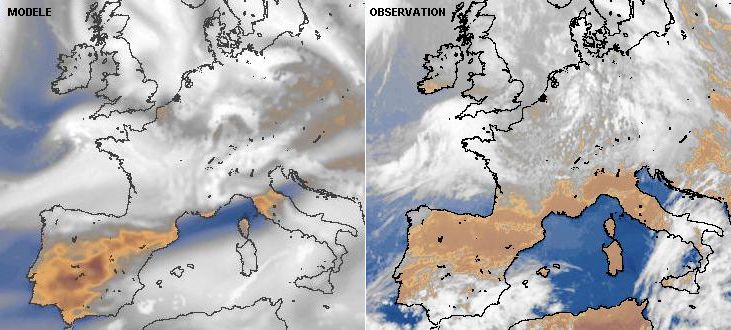
Approximation de Boussinesq ¶ cas d’écoulement atmosphérique R e ≫ 1 Re\gg 1 R e ≫ 1 M a ≪ 1 Ma\ll 1 M a ≪ 1
avec prise en compte de
variation de la masse volumique (linéarisation)
ρ = ρ ( T ) = ρ 0 − β θ avec β = ρ 0 / T 0 et θ = T − T 0 \rho=\rho(T)=\rho_{0}-\beta\theta \mbox{ avec } \beta=\rho_{0}/T_{0} \mbox{ et } \theta=T-T_{0} ρ = ρ ( T ) = ρ 0 − βθ avec β = ρ 0 / T 0 et θ = T − T 0 rotation de la terre⟹ \Longrightarrow ⟹
d i v U → = 0 ρ 0 ( ∂ U → ∂ t + U → . g r a d → U → + 2 Ω → ∧ U → + Ω → ∧ Ω → ∧ r → ) = − g r a d → ( p ′ + ρ 0 g z ) + β θ + μ Δ U → ρ 0 C p ∂ θ ∂ t + ρ 0 U → . g r a d → θ = λ Δ θ \begin{aligned}
div\,\overrightarrow{U} & =0\\
\rho_{0}\left(\frac{\partial\overrightarrow{U}}{\partial t}+\overrightarrow{U}.\overrightarrow{grad}\,\overrightarrow{U}+2\overrightarrow{\Omega}\wedge\overrightarrow{U}+\overrightarrow{\Omega}\wedge\overrightarrow{\Omega}\wedge\overrightarrow{r}\right) & =-\overrightarrow{grad}\left(p'+\rho_{0}gz\right)\\
& +\beta\theta+\mu\Delta\overrightarrow{U}\\
\rho_{0}C_{p}\frac{\partial\theta}{\partial t}+\rho_{0}\overrightarrow{U}.\overrightarrow{grad}\,\theta & =\lambda\Delta\theta\end{aligned} d i v U ρ 0 ( ∂ t ∂ U + U . g r a d U + 2 Ω ∧ U + Ω ∧ Ω ∧ r ) ρ 0 C p ∂ t ∂ θ + ρ 0 U . g r a d θ = 0 = − g r a d ( p ′ + ρ 0 g z ) + βθ + μ Δ U = λ Δ θ exemple écoulement atmosphérique
Figure 5: écoulement en météorologie
Écoulement compressible ¶ cas d’écoulement avec effet de compressibilité R e = ∞ Re=\infty R e = ∞
Modèle: fluide parfait compressible
Équations d’Euler ¶ ∂ ρ ∂ t + d i v ( ρ U → ) = 0 \frac{\partial\rho}{\partial t}+div(\rho\overrightarrow{U})=0 ∂ t ∂ ρ + d i v ( ρ U ) = 0 ∂ ρ U → ∂ t + d i v ( ρ U → ⊗ U → ) = − g r a d → p \frac{\partial\rho\overrightarrow{U}}{\partial t}+div(\rho\overrightarrow{U}\otimes\overrightarrow{U})=-\overrightarrow{grad}\,p ∂ t ∂ ρ U + d i v ( ρ U ⊗ U ) = − g r a d p ∂ ρ ( e + 1 2 V 2 ) ∂ t + d i v ( ( ρ ( e + 1 2 V 2 ) + p ) U → ) = 0 \frac{\partial\rho(e+\frac{1}{2}V^{2})}{\partial t}+div((\rho(e+\frac{1}{2}V^{2})+p)\overrightarrow{U})=0 ∂ t ∂ ρ ( e + 2 1 V 2 ) + d i v (( ρ ( e + 2 1 V 2 ) + p ) U ) = 0 avec e = 1 γ − 1 p ρ \mbox{ avec } e=\frac{1}{\gamma-1}\frac{p}{\rho} avec e = γ − 1 1 ρ p Figure 6: Ondes de choc autour d’un F18
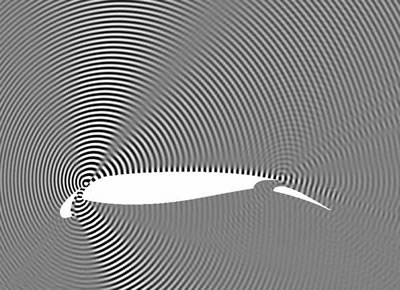
Acoustique ¶ En considérant de petites fluctuations de masse volumique ρ ′ \rho' ρ ′ p ′ p' p ′ U ′ U' U ′ ρ 0 \rho_0 ρ 0 p 0 p_0 p 0 ρ = ρ 0 + ρ ′ \rho=\rho_{0}+\rho' ρ = ρ 0 + ρ ′ p = p 0 + p ′ p=p_{0}+p' p = p 0 + p ′ U → = U ′ → \overrightarrow{U} = \overrightarrow{U'} U = U ′
En linéarisant autour de cet état de base, on pour obtenir:
∂ ρ ′ ∂ t + d i v ( ρ 0 U → ′ ) = 0 ∂ ρ 0 U ′ → ∂ t = − g r a d → p ′ p ′ p 0 − γ ρ ′ ρ 0 = 0 \begin{aligned}
\frac{\partial\rho'}{\partial t}+div(\rho_{0}\overrightarrow{U}') & =0\\
\frac{\partial\rho_{0}\overrightarrow{U'}}{\partial t} & =-\overrightarrow{grad}\,p'\\
\frac{p'}{p_{0}}-\gamma\frac{\rho'}{\rho_{0}} & =0\end{aligned} ∂ t ∂ ρ ′ + d i v ( ρ 0 U ′ ) ∂ t ∂ ρ 0 U ′ p 0 p ′ − γ ρ 0 ρ ′ = 0 = − g r a d p ′ = 0 ce qui conduit à l’ équations de propagation d’ondes sonores
∂ 2 p ∂ t 2 − γ p 0 ρ 0 Δ p = 0 \frac{\partial^{2}p}{\partial t^{2}}-\gamma\frac{p_{0}}{\rho_{0}}\Delta p=0 ∂ t 2 ∂ 2 p − γ ρ 0 p 0 Δ p = 0 Figure 7: Propagation d’ondes sonores autour d’un profil à 3 corps