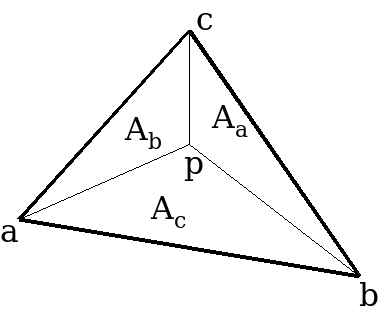
avec :
alpha= Aa / A
beta= Ab / A
gamma = Ac / A
et alpha + beta + gamma = 1
l'aire d'un triangle est simplement la norme du produit vectoriel de 2 aretes : A = ac x ab
donc le point p appartient au
triangle A (abc) si alpha + beta + gamma = 1,
et cette condition n'est vérifiée que si les triangles Ac
(abp), Aa (bcp) et Ab (cap) sont orientés de la même
manière que le triangle A (abc),
ou encore, p se trouve à gauche des 3 aretes du triangle A.