Rappels de Mathématique January 1, 2012
La description des écoulements en mécanique des fluides nécessite une maîtrise des outils mathématiques de base:
vecteurs et opérateurs vectoriels en 2D et 3D
fonctions scalaires et vectorielles de plusieurs variables (espace et temps)
opérateurs différentielles et intégrales sur les fonctions
Vecteurs ¶ vecteur en 2D ¶ Soient A → \overrightarrow{A} A B → \overrightarrow{B} B R 2 R^{2} R 2
composantes dans un repère cartésien de base ( e ⃗ 1 , e ⃗ 2 ) (\vec{e}_1,\vec{e}_2) ( e 1 , e 2 )
[ A 1 , A 2 ] [A_{1},A_{2}] [ A 1 , A 2 ] { A i } i = 1 , 2 \{A_{i}\}_{i=1,2} { A i } i = 1 , 2
A → = A 1 e ⃗ 1 + A 2 e ⃗ 2 = ∑ i = 1 2 A i e ⃗ i \overrightarrow{A}=A_1 \vec{e}_1+A_2 \vec{e}_2=\sum_{i=1}^2 A_i \vec{e}_i A = A 1 e 1 + A 2 e 2 = i = 1 ∑ 2 A i e i [ B 1 , B 2 ] [B_{1},B_{2}] [ B 1 , B 2 ] { B i } i = 1 , 2 \{B_{i}\}_{i=1,2} { B i } i = 1 , 2
B → = B 1 e ⃗ 1 + B 2 e ⃗ 2 = ∑ i = 1 2 B i e ⃗ i \overrightarrow{B}=B_1 \vec{e}_1+B_2 \vec{e}_2=\sum_{i=1}^2 B_i \vec{e}_i B = B 1 e 1 + B 2 e 2 = i = 1 ∑ 2 B i e i produit scalaire: scalaire
A → . B → = A 1 B 1 + A 2 B 2 = ∑ i = 1 2 A i B i \overrightarrow{A}.\overrightarrow{B}=A_{1}B_{1}+A_{2}B_{2}=\sum_{i=1}^{2}\,A_{i}B_{i} A . B = A 1 B 1 + A 2 B 2 = i = 1 ∑ 2 A i B i norme euclidienne:
∥ A → ∥ = A 1 2 + A 2 2 \left\Vert \overrightarrow{A}\right\Vert =\sqrt{A_{1}^{2}+A_{2}^{2}} ∥ ∥ A ∥ ∥ = A 1 2 + A 2 2 produit vectoriel: vecteur
C → = A → ∧ B → \overrightarrow{C}=\overrightarrow{A}\wedge\overrightarrow{B} C = A ∧ B perpendiculaire au plan d’amplitude A 1 B 2 − A 2 B 1 A_{1}B_{2}-A_{2}B_{1} A 1 B 2 − A 2 B 1
produit tensoriel: matrice
M ‾ ‾ = A → ⊗ B → = [ A 1 B 1 A 1 B 2 A 2 B 1 A 2 B 2 ] \overline{\overline{M}}=\overrightarrow{A}\otimes\overrightarrow{B}=\left[\begin{array}{cc}
A_{1}B_{1} & A_{1}B_{2}\\
A_{2}B_{1} & A_{2}B_{2}
\end{array}\right] M = A ⊗ B = [ A 1 B 1 A 2 B 1 A 1 B 2 A 2 B 2 ] avec M i j = A i B j M_{ij}=A_{i}B_{j} M ij = A i B j
les coordonnées cartésiennes d’un point M sont notées [ x 1 , x 2 ] \left[x_{1},x_{2}\right] [ x 1 , x 2 ] [ O , e ⃗ 1 , e ⃗ 2 ] [O,\vec{e}_1,\vec{e}_2] [ O , e 1 , e 2 ]
O M → = x 1 e ⃗ 1 + x 2 e ⃗ 2 \overrightarrow{OM}= x_1 \vec{e}_1 + x_2 \vec{e}_2 OM = x 1 e 1 + x 2 e 2 ou [ x , y ] \left[x,y\right] [ x , y ] [ O , e x → , e y → ] [O,\overrightarrow{e_{x}},\overrightarrow{e_{y}}] [ O , e x , e y ]
O M → = x e x → + y e y → \overrightarrow{OM}= x \overrightarrow{e_{x}} + y \overrightarrow{e_{y}} OM = x e x + y e y vecteur en 3D ¶ Soient A → \overrightarrow{A} A B → \overrightarrow{B} B R 3 R^{3} R 3
composantes dans un repère cartésien : { A i } i = 1 , 3 \{A_{i}\}_{i=1,3} { A i } i = 1 , 3 { B i } i = 1 , 3 \{B_{i}\}_{i=1,3} { B i } i = 1 , 3
produit scalaire: scalaire
A → . B → = ∑ i = 1 3 A i B i \overrightarrow{A}.\overrightarrow{B}=\sum_{i=1}^{3}\,A_{i}B_{i} A . B = i = 1 ∑ 3 A i B i produit vectoriel: vecteur
C → = A → ∧ B → \overrightarrow{C}=\overrightarrow{A}\wedge\overrightarrow{B} C = A ∧ B
C → = [ A 2 B 3 − A 3 B 2 , A 3 B 1 − A 1 B 3 , A 1 B 2 − A 2 B 1 ] \overrightarrow{C}=\left[\begin{array}{ccc}
A_{2}B_{3}-A_{3}B_{2}, & A_{3}B_{1}-A_{1}B_{3}, & A_{1}B_{2}-A_{2}B_{1}\end{array}\right] C = [ A 2 B 3 − A 3 B 2 , A 3 B 1 − A 1 B 3 , A 1 B 2 − A 2 B 1 ] produit tensoriel: matrice
M ‾ ‾ = A → ⊗ B → \overline{\overline{M}}=\overrightarrow{A}\otimes\overrightarrow{B} M = A ⊗ B M i j = A i B j M_{ij}=A_{i}B_{j} M ij = A i B j
on note [ x 1 , x 2 , x 3 ] \left[x_{1},x_{2},x_{3}\right] [ x 1 , x 2 , x 3 ] [ O , e 1 → , e 2 → , e 3 → ] [O,\overrightarrow{e_{1}},\overrightarrow{e_{2}},\overrightarrow{e_{3}}] [ O , e 1 , e 2 , e 3 ]
O M → = x 1 e ⃗ 1 + x 2 e ⃗ 2 + x 3 e ⃗ 3 \overrightarrow{OM} = x_1 \vec{e}_1 + x_2 \vec{e}_2 + x_3 \vec{e}_3 OM = x 1 e 1 + x 2 e 2 + x 3 e 3 ou [ x , y , z ] \left[x,y,z\right] [ x , y , z ] [ O , e x → , e y → , e z → ] [O,\overrightarrow{e_{x}},\overrightarrow{e_{y}},\overrightarrow{e_{z}}] [ O , e x , e y , e z ]
O M → = x e ⃗ x + y e ⃗ y + z e ⃗ z \overrightarrow{OM} = x \vec{e}_x + y \vec{e}_y + z \vec{e}_z OM = x e x + y e y + z e z Fonctions de plusieurs variables ¶ fonction scalaire f(x,t) d’une variable d’espace x et du temps t ¶ exemple: f ( x , t ) = x 2 e − t f(x,t)=x^2e^{-t} f ( x , t ) = x 2 e − t
∂ f ∂ t = lim d t → 0 f ( x , t + d t ) − f ( x , t ) d t = − t x 2 e − t \begin{align*}
\frac{\partial f}{\partial t} &=\lim_{dt \to 0} \frac{f(x,t+dt)-f(x,t)}{dt}\\ &= -tx^2e^{-t}
\end{align*} ∂ t ∂ f = d t → 0 lim d t f ( x , t + d t ) − f ( x , t ) = − t x 2 e − t ∂ f ∂ x = lim d x → 0 f ( x + d x , t ) − f ( x , t ) d x = 2 x e − t \begin{align*}
\frac{\partial f}{\partial x}&=\lim_{dx \to 0} \frac{f(x+dx,t)-f(x,t)}{dx}\\
&= 2xe^{-t}
\end{align*} ∂ x ∂ f = d x → 0 lim d x f ( x + d x , t ) − f ( x , t ) = 2 x e − t d f = ∂ f ∂ x d x + ∂ f ∂ t d t = 2 x e − t d x − t x 2 e − t d t \begin{align*}
df &=\frac{\partial f}{\partial x}dx+\frac{\partial f}{\partial t}dt\\
&= 2xe^{-t}\;dx- tx^2e^{-t}\;dt
\end{align*} df = ∂ x ∂ f d x + ∂ t ∂ f d t = 2 x e − t d x − t x 2 e − t d t fonction scalaire f(x,y,t) de 2 variables d’espace x,y et du temps t ¶ exemple: f ( x , y , t ) = x 2 y e − t f(x,y,t)=x^2ye^{-t} f ( x , y , t ) = x 2 y e − t
d f = ∂ f ∂ x d x + ∂ f ∂ y d y + ∂ f ∂ t d t = 2 x y e − t d x + x 2 e − t d y − x 2 y e − t d t \begin{align*}
df&=\frac{\partial f}{\partial x}dx+\frac{\partial f}{\partial y}dy+\frac{\partial f}{\partial t}dt\\
&= 2xye^{-t} dx + x^2e^{-t}dy - x^2ye^{-t}dt
\end{align*} df = ∂ x ∂ f d x + ∂ y ∂ f d y + ∂ t ∂ f d t = 2 x y e − t d x + x 2 e − t d y − x 2 y e − t d t son gradient (par rapport aux variables spatiales) est un vecteur de
composantes
[ ∂ f ∂ x , ∂ f ∂ y ] [\frac{\partial f}{\partial x},\frac{\partial f}{\partial y}] [ ∂ x ∂ f , ∂ y ∂ f ]
g r a d → f = ∇ → f = ∂ f ∂ x e x → + ∂ f ∂ y e y → = [ 2 x y e − t x 2 e − t ] \begin{align*}
\overrightarrow{grad}\;f&=\overrightarrow{\nabla}f\,=\,\frac{\partial f}{\partial x}\overrightarrow{e_{x}}+\frac{\partial f}{\partial y}\overrightarrow{e_{y}}\\
&= \begin{bmatrix} 2xye^{-t} \\ x^2e^{-t}\end{bmatrix}
\end{align*} g r a d f = ∇ f = ∂ x ∂ f e x + ∂ y ∂ f e y = [ 2 x y e − t x 2 e − t ] A un instant t fixé, c’est un vecteur perpendiculaire aux courbes
iso-valeurs f ( x , y ) = c s t e f(x,y)=cste f ( x , y ) = cs t e f f f
fonction scalaire f(x,y,z,t) de 3 variables d’espace et du temps ¶ exemple: f ( x , y , z , t ) = x 2 y z e − t f(x,y,z,t)=x^2yze^{-t} f ( x , y , z , t ) = x 2 yz e − t
d f = ∂ f ∂ x d x + ∂ f ∂ y d y + ∂ f ∂ z d z + ∂ f ∂ t d t = 2 x y z e − t d x + x 2 z e − t d y + x 2 y e − t d z − x 2 y z e − t d t \begin{align*}
df&=\frac{\partial f}{\partial x}dx+\frac{\partial f}{\partial y}dy+\frac{\partial f}{\partial z}dz+\frac{\partial f}{\partial t}dt\\
&= 2xyze^{-t} dx + x^2ze^{-t}dy + x^2ye^{-t}dz - x^2yze^{-t}dt
\end{align*} df = ∂ x ∂ f d x + ∂ y ∂ f d y + ∂ z ∂ f d z + ∂ t ∂ f d t = 2 x yz e − t d x + x 2 z e − t d y + x 2 y e − t d z − x 2 yz e − t d t g r a d → f = ∇ → f = ∂ f ∂ x e x → + ∂ f ∂ y e y → + ∂ f ∂ z e z → = [ 2 x y z e − t x 2 z e t x 2 y e t ] \begin{align*}
\overrightarrow{grad}f&=\overrightarrow{\nabla}f\,=\,\frac{\partial f}{\partial x}\overrightarrow{e_{x}}+\frac{\partial f}{\partial y}\overrightarrow{e_{y}}+\frac{\partial f}{\partial z}\overrightarrow{e_{z}}\\
&= \begin{bmatrix} 2xyze^{-t} \\ x^2z e^{t} \\ x^2y e^{t}\end{bmatrix}
\end{align*} g r a d f = ∇ f = ∂ x ∂ f e x + ∂ y ∂ f e y + ∂ z ∂ f e z = ⎣ ⎡ 2 x yz e − t x 2 z e t x 2 y e t ⎦ ⎤ fonction vectorielle U → ( x , y , t ) \overrightarrow{U}(x,y,t) U ( x , y , t ) ¶ c’est une fonction vectorielle de composantes { u ( x , y , t ) , v ( x , y , t ) } \{u(x,y,t),\,v(x,y,t)\} { u ( x , y , t ) , v ( x , y , t )}
exemple: U → ( x , y , t ) = [ 2 x y e − t ( x 2 + y 2 ) e t ] \overrightarrow{U}(x,y,t)=\begin{bmatrix}
2xye^{-t} \\ (x^{2}+y^{2})e^{t}\end{bmatrix} U ( x , y , t ) = [ 2 x y e − t ( x 2 + y 2 ) e t ]
J = [ ∂ u ∂ x ∂ u ∂ y ∂ v ∂ x ∂ v ∂ y ] = [ ∂ u i ∂ x j ] = [ 2 y e − t 2 x e − t 2 x e t 2 y e t ] \begin{align*}
J&=\left[\begin{array}{cc}
\frac{\partial u}{\partial x} & \frac{\partial u}{\partial y}\\
\frac{\partial v}{\partial x} & \frac{\partial v}{\partial y}
\end{array}\right]=\left[\frac{\partial u_{i}}{\partial x_{j}}\right]\\
&= \begin{bmatrix}
2ye^{-t} & 2x e^{-t} \\
2xe^{t} & 2y e^{t}
\end{bmatrix}
\end{align*} J = [ ∂ x ∂ u ∂ x ∂ v ∂ y ∂ u ∂ y ∂ v ] = [ ∂ x j ∂ u i ] = [ 2 y e − t 2 x e t 2 x e − t 2 y e t ] d i v U → = ∇ → . U → = ∂ u ∂ x + ∂ v ∂ y = 2 y e − t + 2 y e t \begin{align*}
div\,\overrightarrow{U}&=\overrightarrow{\nabla}.\overrightarrow{U}=\frac{\partial u}{\partial x}+\frac{\partial v}{\partial y}\\
&= 2ye^{-t} + 2ye^{t}
\end{align*} d i v U = ∇ . U = ∂ x ∂ u + ∂ y ∂ v = 2 y e − t + 2 y e t C’est la trace de la matrice jacobienne J J J
r o t → U → = ∇ → ∧ U → = { ∂ v ∂ x − ∂ u ∂ y } e z → \begin{align*}
\overrightarrow{rot}\,\overrightarrow{U}=\overrightarrow{\nabla}\wedge\overrightarrow{U}=\left\{ \frac{\partial v}{\partial x}-\frac{\partial u}{\partial y}\right\} \overrightarrow{e_{z}}
\end{align*} ro t U = ∇ ∧ U = { ∂ x ∂ v − ∂ y ∂ u } e z l’opérateur de transport :
U → . g r a d → ( ) = u ∂ ∂ x + v ∂ ∂ y \overrightarrow{U}.\overrightarrow{grad}()=u\frac{\partial}{\partial x}+v\frac{\partial}{\partial y} U . g r a d ( ) = u ∂ x ∂ + v ∂ y ∂
traduit le transport par le champ d’une quantité F ( x , y ) F(x,y) F ( x , y ) d F dF d F [ x , y ] [x,y] [ x , y ]
d F = F ( M ′ ) − F ( M ) = U → . g r a d → ( F ) d t avec M M ′ → = d M → = U → d t dF = F(M')-F(M)=\overrightarrow{U}.\overrightarrow{grad}(F)\,dt\,\,\,\mbox{{\, avec\,}}\,\,\overrightarrow{MM'}=\overrightarrow{dM}=\overrightarrow{U}dt d F = F ( M ′ ) − F ( M ) = U . g r a d ( F ) d t avec M M ′ = d M = U d t U → . g r a d → f = u ∂ f ∂ x + v ∂ f ∂ y \overrightarrow{U}.\overrightarrow{grad}f=u\frac{\partial f}{\partial x}+v\frac{\partial f}{\partial y} U . g r a d f = u ∂ x ∂ f + v ∂ y ∂ f U → . g r a d → U → = [ u ∂ u ∂ x + v ∂ u ∂ y u ∂ v ∂ x + v ∂ v ∂ y ] \overrightarrow{U}.\overrightarrow{grad}\overrightarrow{U}=\left[\begin{array}{c}
u\frac{\partial u}{\partial x}+v\frac{\partial u}{\partial y}\\
u\frac{\partial v}{\partial x}+v\frac{\partial v}{\partial y}
\end{array}\right] U . g r a d U = [ u ∂ x ∂ u + v ∂ y ∂ u u ∂ x ∂ v + v ∂ y ∂ v ] fonction vectorielle U → ( x , y , z , t ) \overrightarrow{U}(x,y,z,t) U ( x , y , z , t ) ¶ c’est une fonction vectorielle de composantes
{ u ( x , y , z , t ) , v ( x , y , z , t ) , w ( x , y , z , t ) } \{u(x,y,z,t),\,v(x,y,z,t),\,w(x,y,z,t)\} { u ( x , y , z , t ) , v ( x , y , z , t ) , w ( x , y , z , t )}
sa divergence est un scalaire:
d i v U → = ∇ → . U → = ∂ u ∂ x + ∂ v ∂ y + ∂ w ∂ z div\,\overrightarrow{U}=\overrightarrow{\nabla}.\overrightarrow{U}=\frac{\partial u}{\partial x}+\frac{\partial v}{\partial y}+\frac{\partial w}{\partial z} d i v U = ∇ . U = ∂ x ∂ u + ∂ y ∂ v + ∂ z ∂ w son rotationnel est un vecteur:
r o t → U → = ∇ → ∧ U → = { ∂ w ∂ y − ∂ v ∂ z } e x → + { ∂ u ∂ z − ∂ w ∂ x } e y → + { ∂ v ∂ x − ∂ u ∂ y } e z → \overrightarrow{rot}\,\overrightarrow{U}=\overrightarrow{\nabla}\wedge\overrightarrow{U}=\left\{ \frac{\partial w}{\partial y}-\frac{\partial v}{\partial z}\right\} \overrightarrow{e_{x}}+\left\{ \frac{\partial u}{\partial z}-\frac{\partial w}{\partial x}\right\} \overrightarrow{e_{y}}+\left\{ \frac{\partial v}{\partial x}-\frac{\partial u}{\partial y}\right\} \overrightarrow{e_{z}} ro t U = ∇ ∧ U = { ∂ y ∂ w − ∂ z ∂ v } e x + { ∂ z ∂ u − ∂ x ∂ w } e y + { ∂ x ∂ v − ∂ y ∂ u } e z l’opérateur de transport
U → . g r a d → ( ) = u ∂ ∂ x + v ∂ ∂ y + w ∂ ∂ z \overrightarrow{U}.\overrightarrow{grad}()=u\frac{\partial}{\partial x}+v\frac{\partial}{\partial y}+w\frac{\partial}{\partial z} U . g r a d ( ) = u ∂ x ∂ + v ∂ y ∂ + w ∂ z ∂
U → . g r a d → f = u ∂ f ∂ x + v ∂ f ∂ y + w ∂ f ∂ z \overrightarrow{U}.\overrightarrow{grad}f=u\frac{\partial f}{\partial x}+v\frac{\partial f}{\partial y}+w\frac{\partial f}{\partial z} U . g r a d f = u ∂ x ∂ f + v ∂ y ∂ f + w ∂ z ∂ f U → . g r a d → U → = [ u ∂ u ∂ x + v ∂ u ∂ y + w ∂ u ∂ z u ∂ v ∂ x + v ∂ v ∂ y + w ∂ v ∂ z u ∂ w ∂ x + v ∂ w ∂ y + w ∂ w ∂ z ] \overrightarrow{U}.\overrightarrow{grad}\overrightarrow{U}=\left[\begin{array}{c}
u\frac{\partial u}{\partial x}+v\frac{\partial u}{\partial y}+w\frac{\partial u}{\partial z}\\
u\frac{\partial v}{\partial x}+v\frac{\partial v}{\partial y}+w\frac{\partial v}{\partial z}\\
u\frac{\partial w}{\partial x}+v\frac{\partial w}{\partial y}+w\frac{\partial w}{\partial z}
\end{array}\right] U . g r a d U = ⎣ ⎡ u ∂ x ∂ u + v ∂ y ∂ u + w ∂ z ∂ u u ∂ x ∂ v + v ∂ y ∂ v + w ∂ z ∂ v u ∂ x ∂ w + v ∂ y ∂ w + w ∂ z ∂ w ⎦ ⎤ opérateurs gradient, divergence, et rotationnelle ¶ Notons enfin quelques propriétés de ces opérateurs:
d i v ( g r a d → f ) = Δ f = ∂ 2 f ∂ x 2 + ∂ 2 f ∂ y 2 + ∂ 2 f ∂ z 2 div(\overrightarrow{grad}\,f)=\Delta f=\frac{\partial^{2}f}{\partial x^{2}}+\frac{\partial^{2}f}{\partial y^{2}}+\frac{\partial^{2}f}{\partial z^{2}} d i v ( g r a d f ) = Δ f = ∂ x 2 ∂ 2 f + ∂ y 2 ∂ 2 f + ∂ z 2 ∂ 2 f r o t → ( g r a d → f ) = 0 \overrightarrow{rot}(\overrightarrow{grad}\,f)=0 ro t ( g r a d f ) = 0 d i v ( f U → ) = U → . g r a d → f + f d i v U → div(f\overrightarrow{U})=\overrightarrow{U}.\overrightarrow{grad}\,f\,+f\,div\overrightarrow{U} d i v ( f U ) = U . g r a d f + f d i v U g r a d → ( 1 2 U 2 ) = U → ∧ r o t → U → + U → . g r a d → U → \overrightarrow{grad}(\frac{1}{2}U^{2})=\overrightarrow{U}\wedge\overrightarrow{rot}\,\overrightarrow{U}+\overrightarrow{U}.\overrightarrow{grad}\,\overrightarrow{U} g r a d ( 2 1 U 2 ) = U ∧ ro t U + U . g r a d U Théorème de la divergence: ¶ soit Ω \Omega Ω Γ \Gamma Γ
le bilan des flux à travers la surface Γ \Gamma Γ , soit
∫ Ω d i v ( U → ) d Ω = ∫ Γ U → . n → d s \int_{\Omega}div(\overrightarrow{U})\,d\Omega=\int_{\Gamma}\overrightarrow{U}.\overrightarrow{n}\,ds ∫ Ω d i v ( U ) d Ω = ∫ Γ U . n d s Pour un domaine carré Ω = [ 0 , a ] x [ 0 , a ] \Omega=[0,a]x[0,a] Ω = [ 0 , a ] x [ 0 , a ] a a a
∫ 0 a ∫ 0 a ( ∂ u ∂ x + ∂ v ∂ y ) d x d y = ∫ 0 a d y ∫ 0 a ( ∂ u ∂ x ) d x + ∫ 0 a d x ∫ 0 a ( ∂ v ∂ y ) d y = ∫ 0 a ( u ( a , y ) − u ( 0 , y ) ) d y + ∫ 0 a ( v ( x , a ) − v ( x , a ) ) d x = ∫ Γ x = a U → . n → d s + ∫ Γ x = 0 U → . n → d s + ∫ Γ y = a U → . n → d s + ∫ Γ y = 0 U → . n → d s \begin{align*}
\int_{0}^{a}\int_{0}^{a}(\frac{\partial u}{\partial x}+\frac{\partial v}{\partial y})\,dxdy & = & \int_{0}^{a}dy\int_{0}^{a}(\frac{\partial u}{\partial x})\,dx+\int_{0}^{a}dx\int_{0}^{a}(\frac{\partial v}{\partial y})\,dy\\
& = & \int_{0}^{a}(u(a,y)-u(0,y))dy+\int_{0}^{a}(v(x,a)-v(x,a))dx\\
& = & \int_{\Gamma_{x=a}}\overrightarrow{U}.\overrightarrow{n}\,ds+\int_{\Gamma_{x=0}}\overrightarrow{U}.\overrightarrow{n}\,ds\\
& + & \int_{\Gamma_{y=a}}\overrightarrow{U}.\overrightarrow{n}\,ds+\int_{\Gamma_{y=0}}\overrightarrow{U}.\overrightarrow{n}\,ds
\end{align*} ∫ 0 a ∫ 0 a ( ∂ x ∂ u + ∂ y ∂ v ) d x d y = = = + ∫ 0 a d y ∫ 0 a ( ∂ x ∂ u ) d x + ∫ 0 a d x ∫ 0 a ( ∂ y ∂ v ) d y ∫ 0 a ( u ( a , y ) − u ( 0 , y )) d y + ∫ 0 a ( v ( x , a ) − v ( x , a )) d x ∫ Γ x = a U . n d s + ∫ Γ x = 0 U . n d s ∫ Γ y = a U . n d s + ∫ Γ y = 0 U . n d s ∫ Ω d i v ( f U → ) d Ω = ∫ Γ f U → . n → d s \int_{\Omega}div(f\,\overrightarrow{U})\,d\Omega=\int_{\Gamma}f\,\overrightarrow{U}.\overrightarrow{n}\,ds ∫ Ω d i v ( f U ) d Ω = ∫ Γ f U . n d s Développement limitée (série de Taylor): ¶ fonction d’une variable d’espace x et du temps t ¶ développement limité en temps
f ( x , t + d t ) = f ( x , t ) + ∂ f ∂ t d t + 1 2 ∂ 2 f ∂ t 2 ( d t ) 2 + θ ( d t 2 ) f(x,t+dt)=f(x,t)+\frac{\partial f}{\partial t}dt+\frac{1}{2}\frac{\partial^{2}f}{\partial t^{2}}(dt)^{2}+\theta(dt^{2}) f ( x , t + d t ) = f ( x , t ) + ∂ t ∂ f d t + 2 1 ∂ t 2 ∂ 2 f ( d t ) 2 + θ ( d t 2 ) développement limité en espace
f ( x + d x , t ) = f ( x , t ) + ∂ f ∂ x d x + 1 2 ∂ 2 f ∂ x 2 ( d x ) 2 + θ ( d x 2 ) f(x+dx,t)=f(x,t)+\frac{\partial f}{\partial x}dx+\frac{1}{2}\frac{\partial^{2}f}{\partial x^{2}}(dx)^{2}+\theta(dx^{2}) f ( x + d x , t ) = f ( x , t ) + ∂ x ∂ f d x + 2 1 ∂ x 2 ∂ 2 f ( d x ) 2 + θ ( d x 2 ) développement limité en temps et en espace:
f ( x + d x , t + d t ) = f ( x , t ) + ∂ f ∂ x d x + ∂ f ∂ t d t + 1 2 ∂ 2 f ∂ x 2 d x 2 + ∂ 2 f ∂ x ∂ t d x d t + 1 2 ∂ 2 f ∂ t 2 d t 2 + θ ( d x 2 , d t 2 ) f(x+dx,t+dt)=f(x,t)+\frac{\partial f}{\partial x}dx+\frac{\partial f}{\partial t}dt+\frac{1}{2}\frac{\partial^{2}f}{\partial x^{2}}dx^{2}+\frac{\partial^{2}f}{\partial x\partial t}dxdt+\frac{1}{2}\frac{\partial^{2}f}{\partial t^{2}}dt^{2}+\theta(dx^{2},dt^{2}) f ( x + d x , t + d t ) = f ( x , t ) + ∂ x ∂ f d x + ∂ t ∂ f d t + 2 1 ∂ x 2 ∂ 2 f d x 2 + ∂ x ∂ t ∂ 2 f d x d t + 2 1 ∂ t 2 ∂ 2 f d t 2 + θ ( d x 2 , d t 2 ) Fluides ¶ Un fluide, bien que constitué d’atomes au niveau microscopique, peut
être considéré au niveau macroscopique comme un milieu continu: c’est à
dire que les propriétés du fluide sont des fonctions continues des
variables d’espace ( x , y , z ) (x,y,z) ( x , y , z ) t t t
Décrire le mouvement d’un fluide fait appel à des notions différentes de
celles développées en Mécanique du point ou du solide. Le fluide est en
mouvement continue et on parle donc d’écoulement de fluide.
Contrairement au solide, on s’intéresse donc plus à la vitesse des
particules fluides qu’à leur déplacement ou déformation comme en
mécanique des solides.
particule fluide ¶ Pour décrire un fluide, on introduit la notion de “particule fluide”. On
isole (par la pensée ou en trouvant un moyen de visualisation,
coloration par exemple) des parties restreintes du fluide, appelée
"particules fluide ". Ces “particules fluides” contiennent
statistiquement le même nombre de molécules et doivent avoir un volume
V = a 3 V=a^{3} V = a 3 a a a
a a a L L L
a a a l l l
Ainsi pour de l’hélium à pression et température standard, le libre
parcours moyen vaut:
l ≈ 2 , 6 1 0 − 6 m l\approx2,6\,10^{-6}\,m l ≈ 2 , 6 1 0 − 6 m et dans un volume molaire V \mathcal{V} V
V ≈ 22 1 0 − 3 m 3 \mathcal{V}\approx22\,10^{-3}\,m^{3} V ≈ 22 1 0 − 3 m 3 il y a N = 6 , 02 1 0 23 \mathcal{N}=6,02\,10^{23} N = 6 , 02 1 0 23 a = 0.1 m m ≫ l a=0.1\,mm\,\gg l a = 0.1 mm ≫ l n ≈ 30 1 0 12 n\approx30\,10^{12} n ≈ 30 1 0 12
Pour une particule fluide, on peut alors définir:
sa masse m m m
son volume V V V
sa vitesse U → \overrightarrow{U} U
sa température T T T
sa pression p p p
On peut ensuite en déduire pour la particule:
la masse volumique ρ = m V \rho=\frac{m}{V} ρ = V m
la quantité de mouvement m U → m\overrightarrow{U} m U
la quantité de mouvement par unité de volume
ρ U → \rho\overrightarrow{U} ρ U
l’énergie interne E E E
l’énergie interne par unité de masse e = E m e=\frac{E}{m} e = m E
l’énergie interne par unité de volume ρ e \rho e ρ e
on utilise aussi par abus de langage, le terme densité pour masse
volumique. ce n’est pas exacte, car la densité est par définition un
nombre sans dimension, qui est le rapport entre la masse volumique
ρ \rho ρ ρ 0 = 1000 k g m − 3 \rho_{0}=1000\,kg\,m^{-3} ρ 0 = 1000 k g m − 3 3 , 98 3,98\, 3 , 98
description lagrangienne ¶ On peut, de manière analogue à ce que l’on fait en Mécanique du solide,
isoler (par la pensée ou en trouvant un moyen de visualisation,
coloration par exemple) une partie restreinte du fluide appelée
particule fluide et la suivre au cours du temps c’est à dire connaître à
chaque instant sa position.
Soit M ( t ) M(t) M ( t ) t t t { x M ( t ) , y M ( t ) , z M ( t ) } \{x_{M}(t),y_{M}(t),z_{M}(t)\} { x M ( t ) , y M ( t ) , z M ( t )}
u M = d x M d t , v M = d y M d t , w M = d z M d t u_{M}=\frac{dx_{M}}{dt}\,,\,v_{M}=\frac{dy_{M}}{dt}\,,\,w_{M}=\frac{dz_{M}}{dt} u M = d t d x M , v M = d t d y M , w M = d t d z M Au cours du temps, la particule sera en différents points M , l’ensemble
des points M constitue la trajectoire de la particule. Cette façon
de faire est appelée méthode de Lagrange , les variables introduites
sont appelées variables de Lagrange. Elle s’avère dans la plupart des
cas délicate car il n’est pas facile de suivre toutes les particules qui
peuvent rentrer et sortir du domaine.
description eulérienne ¶ La méthode d’Euler consiste à connaître la vitesse des particules au
cours du temps t à un endroit donné déterminé par ses coordonnées, par
exemple cartésiennes ( x , y , z ) (x,y,z) ( x , y , z )
On choisit un petit élément de volume d x d y d z dxdydz d x d y d z ( x , y , z ) (x,y,z) ( x , y , z ) U → \overrightarrow{U} U t t t ( x , y , z ) (x,y,z) ( x , y , z )
U → = { u ( x , y , z , t ) , v ( x , y , z , t ) , w ( x , y , z , t ) } \overrightarrow{U}=\{u(x,y,z,t),\,v(x,y,z,t),\,w(x,y,z,t)\} U = { u ( x , y , z , t ) , v ( x , y , z , t ) , w ( x , y , z , t )} De façon générale, les propriétés du fluide mesurées par la méthode
d’Euler dépendent donc du point ( x , y , z ) (x,y,z) ( x , y , z ) t t t
Si l’on compare les fluides avec les solides, la première remarque qui
s’impose concerne l’isotropie (les propriétés sont les mêmes dans toutes
les directions spatiales) des fluides usuels qui est toujours réalisée
(si l’on agit pas sur le fluide en tout cas!).
En particulier, en un point quelconque d’un fluide, la pression est
indépendante de la direction de la normale à la surface élémentaire sur
laquelle elle s’exerce (théorème de Pascal).
propriétés d’un écoulement ¶ écoulement stationnaire ¶ L’écoulement du fluide est permanent ou stationnaire si ses
composantes de vitesse sont indépendantes de la variable temps t ; il
est dit non-permanent ou instationnaire si cette condition n’est
pas réalisée.
le lecteur s’évitera de conclure que, dans un écoulement permanent,
la particule fluide n’a pas d’accélération, car ceci est en général
faux ! Dans un écoulement stationnaire, la vitesse en un point est
indépendante du temps, mais elle peut varier d’un point à un autre,
et donc les particules fluides peuvent être soumise à une
accélération
L’écoulement du fluide est uniforme si ses composantes de vitesse
sont indépendantes des coordonnées d’espace; il est non-uniforme si
cette condition n’est pas remplie.
ligne de courant ¶ On appelle ligne de courant , à un instant t fixé, une courbe dont
la direction tangente en chacun de ses points est la direction du
vecteur vitesse. L’équation d’une ligne de courant se calcule par
intégration, à un instant t fixé, des équations suivantes (en notant
d x , d y , d z dx,dy,dz d x , d y , d z ( x , y , z ) (x,y,z) ( x , y , z )
d x u ( x , y , z , t ) = d y v ( x , y , z , t ) = d z w ( x , y , z , t ) \frac{dx}{u(x,y,z,t)}=\frac{dy}{v(x,y,z,t)}=\frac{dz}{w(x,y,z,t)} u ( x , y , z , t ) d x = v ( x , y , z , t ) d y = w ( x , y , z , t ) d z écoulement plan ¶ Si la vitesse n’a pas de composante suivant z z z ( x , y ) (x,y) ( x , y ) t t t
écoulement unidimensionnel ¶ Si la vitesse a une seule composante de vitesse u ( x , t ) u(x,t) u ( x , t )
Cinématique des fluides ¶ dérivation suivant la méthode d’Euler ¶ Considérons la fonction scalaire f ( x , y , z , t ) f(x,y,z,t) f ( x , y , z , t ) ( x , y , z ) (x,y,z) ( x , y , z ) t + d t t+dt t + d t x + u d t , y + v d t , z + w d t x+u\,dt,\,\,y+v\,dt,\,\,z+w\,dt x + u d t , y + v d t , z + w d t f f f
d f = f ( x + u d t , y + v d t , z + w d t , t + d t ) − f ( x , y , z , t ) = ∂ f ∂ t d t + ∂ f ∂ x u d t + ∂ f ∂ y v d t + ∂ f ∂ z w d t + θ ( d t 2 ) \begin{aligned}
df & = & f(x+u\,dt,\,\,y+v\,dt,\,\,z+w\,dt,t+dt)-f(x,y,z,t)\\
& = & \frac{\partial f}{\partial t}dt+\frac{\partial f}{\partial x}u\,dt+\frac{\partial f}{\partial y}v\,dt+\frac{\partial f}{\partial z}w\,dt+\theta(dt^{2})\end{aligned} df = = f ( x + u d t , y + v d t , z + w d t , t + d t ) − f ( x , y , z , t ) ∂ t ∂ f d t + ∂ x ∂ f u d t + ∂ y ∂ f v d t + ∂ z ∂ f w d t + θ ( d t 2 ) La dérivée d f d t \frac{df}{dt} d t df D f D t \frac{Df}{Dt} D t D f
D f D t = ∂ f ∂ t + u ∂ f ∂ x + v ∂ f ∂ y + w ∂ f ∂ z = ∂ f ∂ t + U → . g r a d → f = ∂ f ∂ t + U → . ∇ → f \frac{Df}{Dt}=\frac{\partial f}{\partial t}+u\frac{\partial f}{\partial x}+v\frac{\partial f}{\partial y}+w\frac{\partial f}{\partial z}=\frac{\partial f}{\partial t}+\overrightarrow{U}.\overrightarrow{grad}\,f=\frac{\partial f}{\partial t}+\overrightarrow{U}.\overrightarrow{\nabla}f D t D f = ∂ t ∂ f + u ∂ x ∂ f + v ∂ y ∂ f + w ∂ z ∂ f = ∂ t ∂ f + U . g r a d f = ∂ t ∂ f + U . ∇ f cinématique ¶ Au cours du mouvement, une particule de fluide subit des changements de
position, d’orientation et de forme. Nous considérons deux points
voisins M ( x , y , z M(x,y,z M ( x , y , z M ′ ( x + d x , y + d y , z + d z ) M'(x+dx,y+dy,z+dz) M ′ ( x + d x , y + d y , z + d z ) U → ( M ) \overrightarrow{U}(M) U ( M ) U → ( M ′ ) \overrightarrow{U}(M') U ( M ′ ) t t t
u M ′ = u ( x + d x , y + d y , z + d z , t ) = u M + ∂ u ∂ x d x + ∂ u ∂ y d y + ∂ u ∂ z d z v M ′ = v ( x + d x , y + d y , z + d z , t ) = v M + ∂ v ∂ x d x + ∂ v ∂ y d y + ∂ v ∂ z d z w M ′ = w ( x + d x , y + d y , z + d z , t ) = w M + ∂ w ∂ x d x + ∂ w ∂ y d y + ∂ w ∂ z d z \begin{aligned}
u_{M'} & = & u(x+dx,y+dy,z+dz,t)=u_{M}+\frac{\partial u}{\partial x}dx+\frac{\partial u}{\partial y}dy+\frac{\partial u}{\partial z}dz\\
v_{M'} & = & v(x+dx,y+dy,z+dz,t)=v_{M}+\frac{\partial v}{\partial x}dx+\frac{\partial v}{\partial y}dy+\frac{\partial v}{\partial z}dz\\
w_{M'} & = & w(x+dx,y+dy,z+dz,t)=w_{M}+\frac{\partial w}{\partial x}dx+\frac{\partial w}{\partial y}dy+\frac{\partial w}{\partial z}dz\end{aligned} u M ′ v M ′ w M ′ = = = u ( x + d x , y + d y , z + d z , t ) = u M + ∂ x ∂ u d x + ∂ y ∂ u d y + ∂ z ∂ u d z v ( x + d x , y + d y , z + d z , t ) = v M + ∂ x ∂ v d x + ∂ y ∂ v d y + ∂ z ∂ v d z w ( x + d x , y + d y , z + d z , t ) = w M + ∂ x ∂ w d x + ∂ y ∂ w d y + ∂ z ∂ w d z Ces expressions s’écrivent sous forme matricielle:
U → M ′ = U → M + g r a d ‾ ‾ ( U → ) M M ′ → \overrightarrow{U}_{M'}=\overrightarrow{U}_{M}+\overline{\overline{grad}}(\overrightarrow{U})\,\overrightarrow{MM'} U M ′ = U M + g r a d ( U ) M M ′ En décomposant la matrice des gradients de vitesse
g r a d ‾ ‾ ( U → ) \overline{\overline{grad}}(\overrightarrow{U}) g r a d ( U )
u M ′ = u M + 1 2 ( ( ∂ u ∂ z − ∂ w ∂ x ) d z − ( ∂ v ∂ x − ∂ u ∂ y ) d y ) + d 1 d 1 = + 1 2 ( 2 ∂ u ∂ x d x + ( ∂ u ∂ y + ∂ v ∂ x ) d y + ( ∂ u ∂ z + ∂ w ∂ x ) d z ) v M ′ = v M + 1 2 ( ( ∂ v ∂ x − ∂ u ∂ y ) d x − ( ∂ w ∂ y − ∂ v ∂ z ) d z ) + d 2 d 2 = + 1 2 ( ( ∂ u ∂ y + ∂ v ∂ x ) d x + 2 ∂ v ∂ y d y + ( ∂ v ∂ z + ∂ w ∂ y ) d z ) u M ′ = u M + 1 2 ( ( ∂ w ∂ y − ∂ v ∂ z ) d y − ( ∂ u ∂ z − ∂ w ∂ x ) d x ) + d 3 d 3 = + 1 2 ( ( ∂ w ∂ x + ∂ u ∂ z ) d x + ( ∂ w ∂ y + ∂ v ∂ z ) d y + 2 ∂ w ∂ z d z ) \begin{aligned}
u_{M'} & = & u_{M}+\frac{1}{2}\left((\frac{\partial u}{\partial z}-\frac{\partial w}{\partial x})dz-(\frac{\partial v}{\partial x}-\frac{\partial u}{\partial y})dy\right)+d_{1}\\
d_{1} & = & +\frac{1}{2}\left(2\frac{\partial u}{\partial x}dx+(\frac{\partial u}{\partial y}+\frac{\partial v}{\partial x})dy+(\frac{\partial u}{\partial z}+\frac{\partial w}{\partial x})dz\right)\\
v_{M'} & = & v_{M}+\frac{1}{2}\left((\frac{\partial v}{\partial x}-\frac{\partial u}{\partial y})dx-(\frac{\partial w}{\partial y}-\frac{\partial v}{\partial z})dz\right)+d_{2}\\
d_{2} & = & +\frac{1}{2}\left((\frac{\partial u}{\partial y}+\frac{\partial v}{\partial x})dx+2\frac{\partial v}{\partial y}dy+(\frac{\partial v}{\partial z}+\frac{\partial w}{\partial y})dz\right)\\
u_{M'} & = & u_{M}+\frac{1}{2}\left((\frac{\partial w}{\partial y}-\frac{\partial v}{\partial z})dy-(\frac{\partial u}{\partial z}-\frac{\partial w}{\partial x})dx\right)+d_{3}\\
d_{3} & = & +\frac{1}{2}\left((\frac{\partial w}{\partial x}+\frac{\partial u}{\partial z})dx+(\frac{\partial w}{\partial y}+\frac{\partial v}{\partial z})dy+2\frac{\partial w}{\partial z}dz\right)\end{aligned} u M ′ d 1 v M ′ d 2 u M ′ d 3 = = = = = = u M + 2 1 ( ( ∂ z ∂ u − ∂ x ∂ w ) d z − ( ∂ x ∂ v − ∂ y ∂ u ) d y ) + d 1 + 2 1 ( 2 ∂ x ∂ u d x + ( ∂ y ∂ u + ∂ x ∂ v ) d y + ( ∂ z ∂ u + ∂ x ∂ w ) d z ) v M + 2 1 ( ( ∂ x ∂ v − ∂ y ∂ u ) d x − ( ∂ y ∂ w − ∂ z ∂ v ) d z ) + d 2 + 2 1 ( ( ∂ y ∂ u + ∂ x ∂ v ) d x + 2 ∂ y ∂ v d y + ( ∂ z ∂ v + ∂ y ∂ w ) d z ) u M + 2 1 ( ( ∂ y ∂ w − ∂ z ∂ v ) d y − ( ∂ z ∂ u − ∂ x ∂ w ) d x ) + d 3 + 2 1 ( ( ∂ x ∂ w + ∂ z ∂ u ) d x + ( ∂ y ∂ w + ∂ z ∂ v ) d y + 2 ∂ z ∂ w d z ) soit sous forme vectorielle:
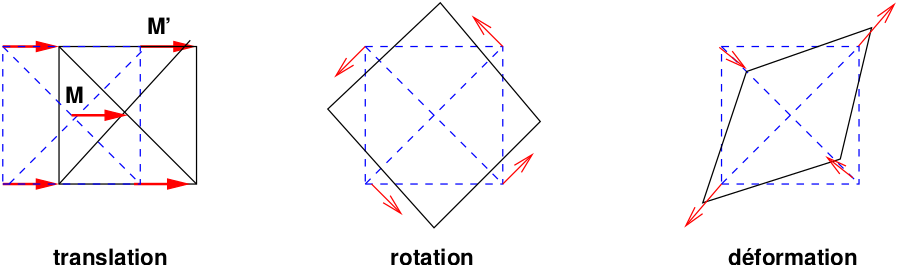
U → M ′ = U → M ⏟ translation + Ω → ∧ M M ′ → ⏟ rotation + D → ⏟ d e ˊ formation \overrightarrow{U}_{M'}=\underbrace{\overrightarrow{U}_{M}}_{\mbox{{translation}}}+\underbrace{\overrightarrow{\Omega}\wedge\overrightarrow{MM'}}_{\mbox{{rotation}}}+\underbrace{\overrightarrow{D}}_{\mbox{{déformation}}} U M ′ = translation U M + rotation Ω ∧ M M ′ + d e ˊ formation D où
Ω → = 1 2 r o t → U → \overrightarrow{\Omega}=\frac{1}{2}\overrightarrow{rot}\,\overrightarrow{U} Ω = 2 1 ro t U D → \overrightarrow{D} D
mouvement et déformation d’une particule fluide
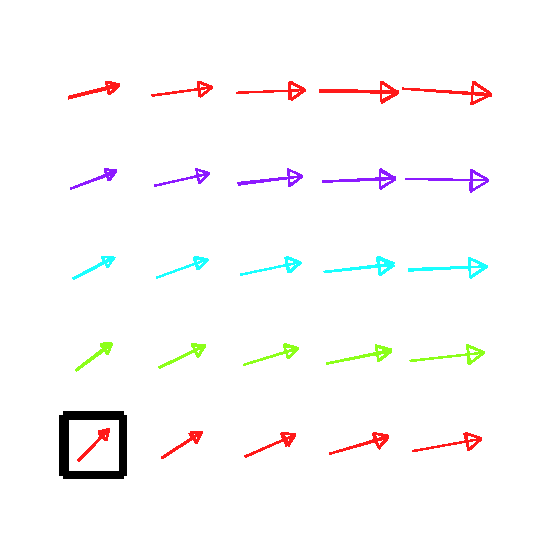
Pour un champ de vitesse à l’origine U ( 0 , 0 ) = [ 2 , 2 ] U(0,0)=[2,2] U ( 0 , 0 ) = [ 2 , 2 ]
g r a d → U = ( 2 1 − 1 − 1 ) \overrightarrow{grad}\,U=\left(\begin{array}{cc}
2 & 1\\
-1 & -1
\end{array}\right) g r a d U = ( 2 − 1 1 − 1 ) on détermine la trajectoire et la déformation de la particule fluide:
Champ de vitesse et position initiale d’une particule fluide
La vidéo suivante montre la trajectoire et la déformation de cette particule fluide;
trajectoire et déformation d’une particule fluide