M2 - Images
TP1 - transformations et pipeline
Partie 1 : affichage d'une primitive.
L'opération fondamentale réalisée par un pipeline de rendu est le
dessin d'une primitive : déterminer quels pixels permettent de
remplir une forme "simple" dans l'image résultat.
Cette opération est découpée en plusieurs étapes :
- transformation des sommets de la primitive dans le repère
projectif homogène de la camera,
- identifier les pixels qui font partie de la forme,
- colorier les pixels.
exercice 1 : transformations
Les objets et leurs sommets sont décrits dans un
repère local, puis ces objets sont placés et orientés dans le repère
de la scène. Un observateur / camera est également placé et orienté
dans le repère de la scène. Une transformation de projection 3d vers
2d est aussi associée à l'observateur. Ces 3 transformations sont
classiquement représentées par des matrices homogenes 4x4 :
Model (transformation du repère local au repère
de la scène),
View (transformation du repère de la scène au
repère camera)
Projection (transformation du repère camera au
repère projectif homogène de la camera).
Plus une autre qui représente les dimensions de l'image résultat :
Viewport (transformation du repère projectif
homogène vers le repère de l'image).
Il est possible de composer ces matrices afin de construire une
seule matrice de transformation permettant de passer directement du
repère local de l'objet au repère de l'image. Ecrivez cette
relation.
Par construction de la transformation de projection, les points
visibles par l'observateur se retrouvent dans le repere projectif
(apres transformation) à l'interieur du cube unitaire [-1 1] sur les
3 axes.
Si l'on choisit une matrice identité comme projection, ou peut on
placer des points qui seront visibles / associés à un pixel de
l'image ?
prise en main de gKit :
mise à jour : 09/10/2014
version de gKit2 et des dépendances precompilées pour
les salles tp7 et tp8 du nautibus.
premake4 est également disponible dans
./local/linux32/bin/premake4
pour construire les makefiles pour compiler le tp :
./local/linux32/bin/premake4 gmake
make tp1 -j4
./tp1
mise à jour : 24/09/2013
version de gKit2 et dépendances precompilées pour les
salles tp du nautibus.
premake4 est également disponible dans ./local/linux/bin/premake4
pour construire les makefiles pour compiler le tp :
./local/linux/bin/premake4 gmake
make -j4
./main
mise à jour des infos pour recompiler les dépendances sur mac et
linux sur la page précédente.
installez gKit et ses
dépendances.
compilez la doc avec Doxygen. Elle sera consultable dans
doc/html/index.html. Les classes de bases sont documentées dans la
partie module de la documentation générée.
gKit utilise la classe gk::Transform pour représenter et manipuler
les transformations. Les classes gk::Point et gk::Vector permettent
de représenter un point et un vecteur. Les fonctions de construction
des transformations standards sont aussi disponibles :
gk::Translate(), gk::Rotate(), gk::Perspective().
La transformation d'un point s'écrit directement :
gk::Transform T;
// identité
gk::Point p;
gk::Point q= T(p);
// renvoie le point reel transforme
La composition de transformations est aussi disponible :
gk::Transform A, B;
gk::Transform C= A * B;
La transformation inverse est également calculée :
gk::Transform M= C.inverse();
Pour obtenir le point homogène après la transformation d'un point p
:
gk::HPoint h;
M(p, h); //
renvoie le point homogene apres la transformation
Si le point homogène est dans la zone visible (le cube unitaire -1,
1), on peut le projetter / normaliser pour obtenir le point 3d
associé :
gk::Point q;
if(h.isVisible())
q=
h.project(); // projette le point homogene dans
l'espace 3d reel.
gKit utilise la classe gk::Image pour représenter un ensemble de
pixels et fournit egalement des fonctions permettant d'enregistrer
l'image dans un fichier.
gk::Image *image= new gk::Image(largeur, hauteur);
gk::ImageIO::writeImage("resultat.bmp", image);
Les méthodes gk::Image::pixel(x, y) et gk::Image::setPixel(x, y,
color) permettent de lire et de modifier la couleur du pixel de
coordonnées x, y. La classe de base gk::VecColor représente une
couleur par un triplet rouge, vert, bleu, avec des valeurs comprises
entre 0 et 1.
exemple:
#include "Vec.h" // type
vecteur, point, couleur, etc. de "base"
#include "Image.h" // classe image
#include "ImageIO.h" // entrees / sorties sur des
images
int main( )
{
gk::Image *image=
gk::createImage(512, 512);
// cree une image de 512x512 pixels
// parcourir tous les pixels de
l'image
for(int y= 0; y <
image->height; y++) // chaque
ligne
for(int x= 0; x
< image->width; x++) // chaque colonne
image->setPixel(x, y, gk::VecColor(1, 0, 0));
// colorie chaque pixel en rouge
// enregistre le resultat
gk::ImageIO::writeImage("out.bmp",
image);
delete image;
return 0;
}
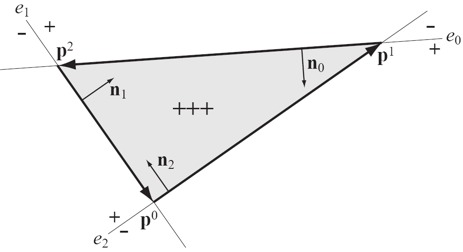
exercice 2 : version fragmentation / rasterization.
Choisissez 3 sommets p0, p1, et p2 ainsi que leur
transformation dans le repère image après projection et vérification
de leur visibilité (on suppose que les 3 sommets sont visibles et se
projettent sur l'image).
Définissez les équations 2d des 3 arêtes du triangle e0, e1, e2,
sous la forme : e(x,y)= ax + by + c.
Un pixel (px, py) est à l'intérieur du triangle s'il se trouve dans
le demi plan positif défini par chaque arête (du coté de la
normale),
c'est dire si e0(px, py) > 0, e1(px, py) > 0 et e2(px, py)
> 0.
Comment construire les équations des arêtes pour vérifier cette
condition ?
indication :
l'aire signée d'un triangle orienté dans
le plan se calcule directement : cf Modern triangles
/ section Modern triangles
aire signée du triangle p0, p1, p2= 0.5 * [ (x1 -
x0) * (y2 - y0) - (x2 - x0) (y1 - y0) ]
on peut également calculer l'aire signée du
triangle formé par l'arete p0p1 et un point p : aire p0p1p = 0.5 * [
(x1 - x0) * (py - y0) - (px - x0) (y1 - y0) ]
et le reformuler : e0(px, py)= a0*px + b0*py +
c0= [-(y1 - y0)] * px + [(x1 - x0)] * py + [x0 * (y1 - y0) - y0 *
(x1 - x0)]
première solution :
déterminez le rectangle englobant les 3 sommets
dans le repère image et testez l'inclusion de tous les pixels de ce
rectangle.
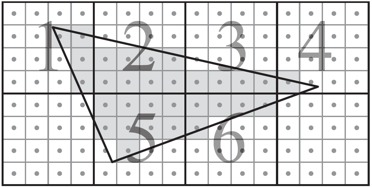
solution efficace ?
Proposez une solution qui teste des blocs de pixels dans un premier
temps, puis qui teste tous les pixels des blocs couvrant
(partiellement ou entièrement) le triangle.
Comment déterminer efficacement qu'un bloc se trouve entièrement à
l'extérieur du triangle (sans tester tous les pixels) ?
(indication : ses 4 sommets sont à l'exterieur de la même
arête du triangle)
Lorsqu'un bloc contient, au moins partiellement, le triangle, testez
tous les pixels du bloc (les blocs 1 à 6 dans l'exemple).
Cette "optimisation" est-elle interressante dans tous les cas ?
Comment choisir la taille des blocs ?
pour les curieux :
Que se passe-t-il lorsque un ou plusieurs sommets ne sont pas
visibles ? Il n'est plus possible de faire le test en 2d dans le
plan image, il faut transposer les tests dans le repère projectif
homogène 4d. Une solution élégante est présentée section 2 dans :
"Incremental
and
Hierarchical
Hilbert
Order
Edge Equation Polygon Rasterization"
M.D. McCool, C. Wales, K. Moule,
gh 2001
exercice 3 : version Reyes, subdivision.
Une autre solution, applique directement le principe "diviser pour
règner" au problème. Il est immédiat de dessiner un objet plus petit
qu'un pixel, dans les autres cas, il suffit de découper l'objet.
Proposez une solution utilisant cette idée.
indication : pour subdiviser un triangle en 4, il suffit de
calculer le point milieu de chaque arête et de construire les 4 sous
triangles.
Cette solution peut-elle fonctionner lorsque certains sommets sont
en dehors de la zone visible ? Modifiez votre programme pour inclure
cette fonctionnalité.
indication : il serait judicieux d'arreter la subdivision
lorsque une partie de la surface est entierement non visible.
exercice 4 : version lancer de rayon.
La dernière catégorie de solution consiste à déterminer l'équation
de la droite passant par le centre de chaque pixel de l'image et à
tester l'intersection de cette droite avec le triangle.
La classe gk::Triangle fournit le test d'intersection d'un triangle
et d'un rayon, cf gk::Triangle::intersect(). En résumé, la fonction
calcule l'intersection de la droite avec le plan portant le triangle
puis vérifie que le point est bien à l'intérieur du triangle.
Comment calculer les extrémites du rayon passant par le centre du
pixel (x, y) ? Dans quel espace est-il le plus simple de travailler
?
indication : la classe gk::Ray représente un rayon par son
origine, o, et sa direction, d. Un point le long du rayon est
represente p(t)= o + t . d
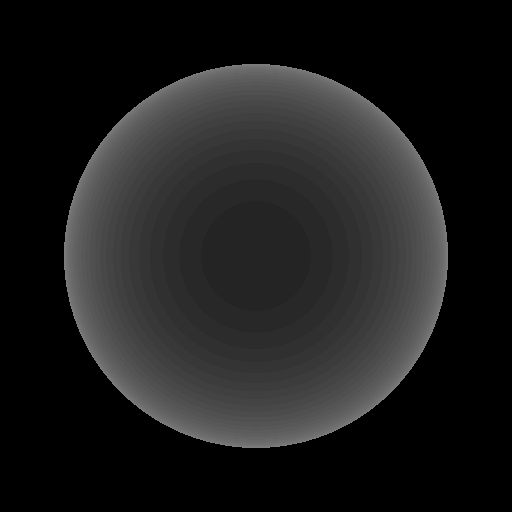
Partie 2 : affichage d'une surface.
Mêmes questions avec une surface simple : une sphère de rayon R et
de centre c. Il existe de nombreuses manières de représenter une
sphère, dans chaque cas il faut choisir la version la plus adaptée.
indications pour la version lancer de rayon.
La dérivation du test d'intersection entre une droite et une sphère
se trouve sur wikipedia, par exemple :
http://en.wikipedia.org/wiki/Line%E2%80%93sphere_intersection
Dans ce cas, on utilise la forme implicite f(x, y, z) = 0 indiquant
les points à la surface de la sphère.
indications pour la version Reyes.
Il faut choisir une représentation de la surface qui permette de
manipuler une partie de la surface.
La représentation paramétrique semble bien adaptée, la surface
complète est décrite par 2 angles, theta variant entre 0 et pi
(angle par rapport à l'axe Y) et phi variant entre 0 et 2pi (angle
par rapport à l'axe X). Une partie de la surface sera representée
par un intervalle sur theta et un autre sur phi. Pour subdiviser la
surface, il suffit de couper chaque intervalle en deux pour obtenir
4 sous surfaces.
Le découpage de la partie de la surface va changer le comportement
de l'algorithme : un découpage régulier de l'intervalle \theta, \phi
ne crée pas un découpage régulier de la surface de la spĥère
(pourquoi ?). Peut-on découper la surface de la sphère de manière
régulière ? Quel avantage peut on attendre d'un découpage régulier ?
indications pour la version raster.
Il faudrait convertir la surface de la sphère en un
ensemble de triangles et ensuite les dessiner.
Réalisez la version lancer de rayon et reyes.
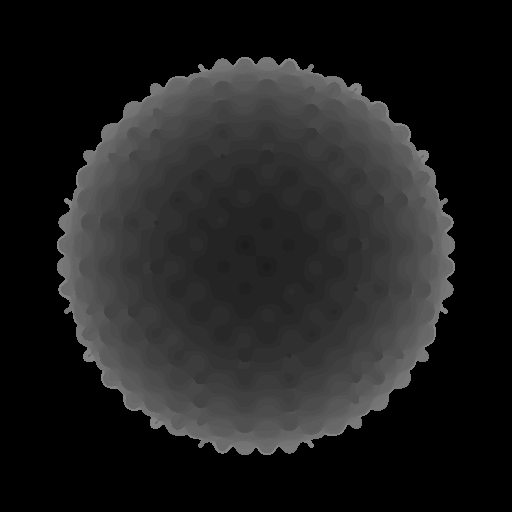
Partie 3 : affichage d'une surface perturbée.
Mêmes questions pour une sphère dont le rayon est perturbé : le
rayon devient une fonction de la position à la surface de la sphère.
Une sphère de centre 0 et de rayon R peut être représentée, sous
forme implcite, par : x² + y² + z² - R² = 0,
et une sphère perturbée par : x² + y² + z² - (R + f(x, y, z))² = 0.
indications pour la version lancer de rayons.
Selon la forme de f, la fonction de perturbation, il peut être
compliqué de trouver explicitement les intersections avec le rayon.
Dans ce cas, il possible d'utiliser une recherche en évaluant
l'équation de la sphère perturbée en plusieurs points le long du
rayon. Selon la position sur le rayon le résultat sera soit négatif
soit positif, l'idée est d'identifier un (petit) intervalle de
positions sur le rayon qui encadre la "vraie" intersection avec la
surface.
Cette technique permet de faire de choses assez impressionnantes,
avec un peu de puissance de calcul :
les bases de cette manière de décrire des objets sont résumées et
illustrées par Inigo Quilez : http://www.iquilezles.org/www/articles/distfunctions/distfunctions.htm
ainsi que d'autres exemples de construction : http://www.iquilezles.org/www/articles/menger/menger.htm
indications pour la version Reyes.
Dans ce cas, il est plus simple d'utiliser la forme
paramétrique de la sphère perturbée. Une solution directe consiste à
exprimer la perturbation en fonction des angles theta et phi :
f(\theta, \phi) au lieu de f(x, y, z).
Réalisez la version lancer de rayons et reyes.
Pour les curieux : affichage de plusieurs surfaces et filtrage.
Modifiez une des solutions d'affichage pour traiter le cas de
plusieurs triangles ou sphères pouvant se recouvrir.
Modifiez une des solutions d'affichage pour traiter le cas d'objets
semi transparents.
Modifiez une des solutions d'affichage pour produire une version
filtrée de l'image : la contribution d'une primitive à un pixel
devrait être proportionnelle à l'aire visible de l'intersection de
la primitive et du pixel.
Modifiez la version Reyes pour la rendre plus efficace. Il est
couteux de subdiviser récursivement chaque surface jusqu'a obtenir
une projection inférieure à un pixel. Réalisez l'opération dice du
pipeline Reyes (c'est la même idée que le test par bloc de pixels
utilisé par la rasterization.) L'objectif est produire une grille
régulière à la surface de l'objet dont chaque cellule se projette
approximativement sur un pixel.