%matplotlib inline
import numpy as np
import sympy as sp
import k3d
import matplotlib.pyplot as plt
from IPython.core.display import HTML
from IPython.display import display,Image
from sympy.physics.vector import init_vprinting
init_vprinting(use_latex='mathjax', pretty_print=False)
Documentation¶
calcul symbolique Sympy: https://docs.sympy.org/latest/index.html
bibliotheque Sympy de Mechanique classique: https://docs.sympy.org/latest/modules/physics/mechanics/index.html
visualisation 3D k3d: https://k3d-jupyter.org/
Modélisation¶
On modéliser la toupie comme une masse $m$ en $G$, distante de $l$ du point $O$, en rotation autour son axe principal d'inertie (axe de révolution) $\overrightarrow{OG}=l\,\overrightarrow{Z_{2}}$. On suppose que le point $O$ est immobile et la liaison sans frottement.
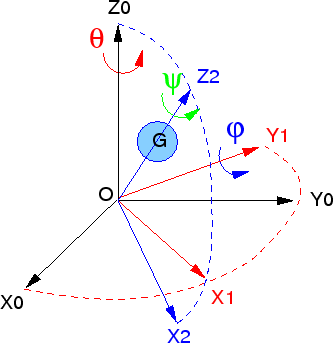
Les 3 degrés de liberté du système sont les 3 angles d'Euler:
$\theta$ l'angle de précession de l'axe de la toupie autour de $Z_{0}$
$\phi$ l'angle de nutation (oscillation de l'axe autour de $Y_{1}$)
$\psi$ l'angle de rotation propre de la toupie autour de son axe $Z_{2}$
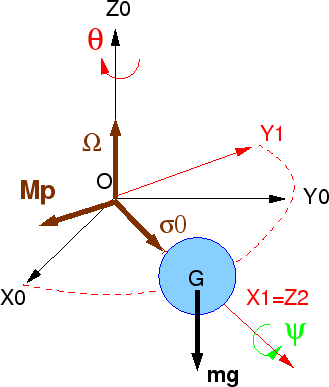
Bilan des forces¶
La toupie est soumise aux forces suivantes:
la force de gravité $-mg\overrightarrow{Z_{0}}$ en $G$
la réaction $\overrightarrow{R}$ en $O$
L'application du théorème du moment cinétique en O permet d'obtenir les 3 équations du mouvement en $\theta$,$\phi$,$\psi$, en éliminant l'inconnue de tension (qui est obtenue par application du théorème sur la quantité de mouvement).
$$\frac{d}{dt}\overrightarrow{\sigma}(O)=-mgl\,\sin\phi\overrightarrow{Y_{1}}$$Effet gyroscopique¶
Si à l'instant initial, la toupie tourne rapidement autour de son axe $Z_{2}$ avec une vitesse angulaire $\omega=\dot{\psi}$, le moment cinétique vaut approximativement
$$\overrightarrow{\sigma}(O)\approx I\omega\overrightarrow{Z_{2}}$$(où $I$ est le moment d'inertie autour de l'axe $Z_{2}$). Le moment du poids engendre un couple suivant $\overrightarrow{Y_{1}}$ perpendiculaire à $\overrightarrow{\sigma}(O)$, qui force l'axe de rotation propre $Z_{2}$ à tourner autour d'un axe perpendiculaire à $Y_{1}$, $Z_{2}$ (effet gyroscopique). Si $\phi\approx\pi/2$ , alors la rotation s'effectue suivant $Z_{0}$ avec un mouvement lent de précession $\Omega=\dot{\theta}\approx cste$.
justification¶
En effet l'équation du mouvement (théorème du moment cinétique) s'écrit:
$$\frac{d}{dt}\overrightarrow{\sigma}(O)=\mathcal{M}_{O}(P)=l\overrightarrow{Z_{2}}\wedge-mg\overrightarrow{Z_{0}}$$avec $\overrightarrow{\sigma}(O)\approx I\omega\overrightarrow{Z_{2}}$. D'où l'on déduit, si $\omega$ est très grand que:
$$\frac{d}{dt}\overrightarrow{\sigma}(O)=\Omega\overrightarrow{Z_{0}}\wedge\overrightarrow{\sigma}(O) \mbox{ avec } \Omega = -\frac{mgl}{I\omega} $$Le moment cinétique $\overrightarrow{\sigma}(O)$, et donc la toupie se met à tourner autour de l'axe vertical $\overrightarrow{Z_{0}}$ avec une vitesse de rotation $\Omega$ (effet gyroscopique). Ce mouvement est appelé précession. La vitesse angulaire de la précession $\Omega$ est donnée par :
$$\Omega=-\frac{mgl}{I\omega}$$et est d'autant plus petite que $\omega$ est grand.
La précession peut être démontrée en plaçant un gyroscope tournant sur son axe horizontal et supporté lâchement à une extrémité. Au lieu de tomber comme on peut s'y attendre, le gyroscope apparaît comme défiant la gravité en restant sur son axe horizontal, même si un bout de l'axe n'est pas supporté. L'extrémité libre de l'axe décrit lentement un cercle dans un plan horizontal. Le moment du gyroscope est fourni par un couple de forces : la gravité pousse vers le bas le centre de la masse du dispositif, et la réaction en O le pousse vers le haut pour supporter le côté libre. Le déplacement résultant de ce moment n'est pas vers le bas, comme l'intuition nous le fait supposer, mais perpendiculaire à la fois au mouvement gravitationnel (le bas) et l'axe de rotation (vers l'extérieur du point d'appui), c'est-à-dire dans une direction horizontale vers l'avant, faisant faire à l'appareil une rotation lente autour du point de support. La réaction en O possède donc une composante horizontale (et non pas uniquement vertical), qui génère ce déplacement .
La démonstration la plus simple et la plus parlante consiste à tenir à bout de bras une roue de vélo par les écrous du moyeu et de la faire tourner rapidement par une autre personne. Lorsque l'on tente de pencher sur le côté la roue en rotation, on verra que le mouvement sera décalé de 90° !
Etude du mouvement général¶
Dans le cas général, on a un mouvement beaucoup plus compliqué avec un mouvement de précession et de nutation de l'axe de la toupie, et des vitesses angulaires variants au cours du temps.
On note cependant que certaines quantités se conservent au cours du temps:
l'énergie totale = énergie cinétique + énergie potentielle: $$E=E_{c}+U=cste$$
la projection du moment cinétique suivant $\overrightarrow{Z_{2}}$ (passe par G) et suivant $\overrightarrow{Z_{0}}$ (direction du poids), puisque que le moment du poids est perpendiculaire à ces deux directions.
Ce sont les 3 intégrales premières du mouvement.
Modélisation¶
On définit 3 repères:
le repère fixe $\mathcal{R}_{0}(X_{0},Y_{0},Z_{0})$ avec $Z_{0}$ suivant la verticale
le repère $\mathcal{R}_{1}$ en rotation de $\theta$ (précession) autour de $Z_{0}$ avec $$\Omega_{1/0}=\Omega_{\mathcal{R}_{1}/\mathcal{R}_{0}}=\frac{d\theta}{dt}Z_{0}$$
le repère $\mathcal{R}_{2}$ en rotation de $\phi$ (nutation) autour de $Y_{1}$ avec $$\Omega_{2/1}=\Omega_{\mathcal{R}_{2}/\mathcal{R}_{1}}=\frac{d\phi}{dt}Y_{1}$$
la toupie est en rotation de $\psi$ (rotation propre) autour de son axe $$Z_{2}\Omega_{3/2}=\frac{d\psi}{dt}Z_{2}$$
Les matrices de changement de repère s'écrivent:
$$\mathcal{M}_{0/1}=\left[\begin{array}{ccc} \cos\theta & -\sin\theta & 0\\ \sin\theta & \cos\theta & 0\\ 0 & 0 & 1 \end{array}\right],\,\,\,\mathcal{M}_{1/0}=\mathcal{M}_{0/1}^{t}$$$$\mathcal{M}_{1/2}=\left[\begin{array}{ccc} \cos\phi & 0 & \sin\phi\\ 0 & 1 & 0\\ -\sin\phi & 0 & \cos\phi \end{array}\right],\,\,\,\mathcal{M}_{2/1}=\mathcal{M}_{1/2}^{t}$$La toupie est un solide de révolution d'axe $Z_{2}$, donc dans $\mathcal{R}_{2}$ la matrice d'inertie est diagonale et vaut:
$$\mathcal{I}_{G}=\left[\begin{array}{ccc} I_{2} & 0 & 0\\ 0 & I_{2} & 0\\ 0 & 0 & I_{1} \end{array}\right]$$Prise en compte du frottement¶
Pour prendre en compte le frottement de la toupie en O, on introduit un couple de frottement en O proportionnelle à la vitesse de rotation propre $\dot{\psi}$
$$ C_f = -I_1 K \dot{\psi} Z_2 $$Modélisation sympy¶
from sympy.physics.mechanics import dynamicsymbols, Point, ReferenceFrame
from sympy.physics.mechanics import RigidBody
from sympy.physics.vector import dot
# parametres du problème
l, m, g, I1, I2, K = sp.symbols('l m g I_1 I_2 K')
# degrés de liberté
theta, phi, psi = dynamicsymbols('theta phi psi')
thetap, phip, psip = dynamicsymbols('theta phi psi',level=1)
thetap2, phip2, psip2 = dynamicsymbols('theta phi psi',level=2)
t = sp.symbols('t')
# reperes
O = Point('O')
R0 = ReferenceFrame('R_0')
R1 = ReferenceFrame('R_1')
R1.orient(R0,'Axis',[theta, R0.z])
R2 = ReferenceFrame('R_2')
R2.orient(R1,'Axis',[phi, R1.y])
R3 = ReferenceFrame('R_3')
R3.orient(R2,'Axis',[psi, R2.z])
G = Point('G')
G.set_pos(O,l*R2.z)
# vitesse angulaire de R3/R0
R3.ang_vel_in(R0)
# et acceleration
R3.ang_acc_in(R0)
# matrice d'inertie
from sympy.physics.mechanics import inertia
IG = inertia(R2,I2,I2,I1)
IG
# O fixe dans R0 et G fixe dans R2 (et R3)
O.set_vel(R0,0.)
G.set_vel(R2,0.)
# Définition du solide toupie avec R3 repere lié à la toupie
toupie = RigidBody('Toupie',G,R3,m,(IG,G))
calcul des vitesses par composition des vitesses¶
O et G appartiennent au même solide et sont fixes dans $R_2$ $$ V_{G/R_0} = V_{O/R_0} + \Omega_{R_2/R_O} \wedge OG $$
# composition des vitesses: vitesse de G / R0
G.v2pt_theory(O,R0,R2)
# et son accélération / R0
G.acc(R0)
# moment cinétique en G / R0
from sympy.physics.mechanics import linear_momentum, angular_momentum
angular_momentum(G,R0,toupie)
# moment cinetique en O
sigma_O = angular_momentum(O,R0,toupie)
sigma_O
# simplification I2O = I2 + ml^2
I2O = sp.symbols('I_2O')
sigma_O=sigma_O.subs(I2,I2O-m*l**2).simplify()
équations du mouvement: PFD¶
$$\frac{d}{dt}\overrightarrow{\sigma}(O)=\mathcal{M}_{O}(P)+ C_f$$# derivation du moment cinétique / R0
from sympy.physics.vector import time_derivative,dot
sigma_Op = time_derivative(sigma_O,R0)
sigma_Op
# vecteur poids
-m*g*R0.z
# moment du poids
Mp = G.pos_from(O)^(-m*g*R1.z)
Mp
# dans R2
Mp = Mp.express(R2)
Mp
# couple de frottement
Cf = -K*I1*psip*R2.z
Cf
# equations du mouvement
Eqs = sigma_Op - Mp -Cf
Eqs
# équations projetés dans R2
display(sp.Eq(Eqs.dot(R2.x),0))
display(sp.Eq(Eqs.dot(R2.y),0))
display(sp.Eq(Eqs.dot(R2.z),0))
Intégrales premières¶
# energie cinétique
Ec = toupie.kinetic_energy(R0)
Ec = Ec.subs(I2,I2O-m*l**2).simplify()
Ec
# et potentielle
toupie.potential_energy = m*g*dot(G.pos_from(O),R0.z)
Ep = toupie.potential_energy
Ep
# conservation moment cinétique / R2.z
s2z = dot(sigma_O,R2.z)
s2z
# conservation moment cinétique / R0.z
s0z = dot(sigma_O,R0.z)
s0z
# conservation energie totale
Et = Ep + Ec
Et = Et.collect(I1)
Et
simplification¶
# parametres
omega, cste = sp.symbols('omega cste')
display(sp.Eq(omega , s2z/I1))
# simplification omega**2/2
exp = (s2z**2/I1**2/2).expand()
exp
intégrales premières simplifiées¶
sp.Eq(s2z/I1,omega)
s0z = s0z.subs(s2z/I1,omega).expand()
sp.Eq(s0z,cste)
Et0 = Et.subs(exp,omega**2/2).collect(I2O) - I1*omega**2/2
sp.Eq(Et0,cste)
Application¶
Cas d'une toupie = disque de rayon $R$ sur un axe $l = 2R$
R , alpha = sp.symbols('R alpha')
display(sp.Eq(alpha, g/R))
display(sp.Eq(I1, m*R**2/2))
display(sp.Eq(I2O, m*R**2 + m*l**2).subs(l,2*R))
vals = [(I1,m*R**2/2),(I2,m*R**2),(I2O,5*m*R**2),(l,2*R)]
vals
Intégrales premières du mouvement¶
eq1 = s2z/I1
sp.Eq(eq1,omega)
eq2=(s0z.subs(vals)/(m*R**2)).expand()
sp.Eq(eq2,cste)
eq3=(Et0.subs(vals)/(m*R**2)).expand()
sp.Eq(eq3,cste)
# condition
val1 = [(phi,sp.pi/2)]
val1
# vérification / liste des intégrales premières
display(sp.Eq(eq1.subs(val1),cste))
display(sp.Eq(eq2.subs(val1),cste))
display(sp.Eq(eq3.subs(val1).doit(),cste))
Application numérique: cas sans frottement¶
Valsnum = [(l,2*R), (alpha,g/R), (g,9.81), (R,0.1), (K,0)]
display(Valsnum)
display(vals)
calcul mouvement de la toupie par résolution des 3 EDO¶
eq1=sp.simplify(Eqs.subs(vals).dot(R2.x)/(R**2*m/2))
sp.Eq(eq1,0)
eq2=sp.simplify(Eqs.subs(vals).dot(R2.y)/(R**2*m/4)).subs(g,alpha*R)
sp.Eq(eq2,0)
eq3=sp.simplify(Eqs.subs(vals).dot(R2.z)/(R**2*m/2))
sp.Eq(eq3,0)
changement de variables pour la résolution numérique¶
Pour résoudre numériquement le modèle, on transforme les 3 EDO du 2nd ordre (PFD) en un systèmes d'EDO du 1er ordre avec un changement de variables:
$$ Y = [\theta, \phi, \psi, \dot{\theta}, \dot{\phi}, \dot{\psi}] $$$$ dY = \dot{Y} = [\dot{\theta}, \dot{\phi}, \dot{\psi}, \ddot{\theta}, \ddot{\phi}, \ddot{\psi}] $$Le système d'équations 6x6 s'écrit $$ G(Y,\dot{Y}) =0 $$ avec $$ dY[0] = \dot{Y}[0] \;,\; dY[1] = \dot{Y}[1] \;,\; dY[2] = \dot{Y}[2]$$ et les 3 équations du mouvement
Implémentation dans une classe Toupie qui à partir des équations du mouvement, fait le changement de variables et résoud le système d'EDO du 1er ordre avec la bibliothéque implicite SUNDIALS, et la visualisation 3D avec K3D.
calcul de la solution pour une CI donnée¶
def CI(cas=0):
"""choix de la conditions aux limites (intéressantes): renvoie Y0 et tmax"""
if cas == 1:
# mvt precession
return np.array([0.,np.pi/2,0.,1.,0.,400.]), 8
elif cas == 2:
# petits festons
return np.array([0.,np.pi/4,0.,1.,0.,200.]), 2
elif cas == 3:
return np.array([0.,np.pi/4,0.,4.,0.,100.]), 2
elif cas == 4:
# boucle arriere
return np.array([0.,np.pi/4,0.,8.,0.,200.]), 4
elif cas == 5:
# pendule
return np.array([0.,np.pi/2,0.,0.,0.,10.]), 6
else:
# grandes boucles
return np.array([0.,np.pi/4,0.,-8.,8.,100.]), 2
from Toupie import Toupie
# choix de la CI
Y0,tmax = CI(4)
print("CI=",Y0,"tmax=",tmax)
# parametres du problème: 6 ddl (V), 3 equations (EQS), coordonnées du centre de gavité (CG) et energie (EN)
V = [theta,phi,psi,thetap,phip,psip]
EQS = [eq1.subs(Valsnum),eq2.subs(Valsnum),eq3.subs(Valsnum)]
CG = [G.pos_from(O).dot(R0.x).subs(Valsnum),
G.pos_from(O).dot(R0.y).subs(Valsnum),
G.pos_from(O).dot(R0.z).subs(Valsnum)]
EN = [sp.simplify(Ec.subs(vals)/m).subs(Valsnum),
(Ep.subs(vals)/m).subs(Valsnum)]
T = Toupie(V,EQS,CG,EN)
# calcul de la solution numérique
T.solve(Y0,tmax)
# tracer de la solution angles et positions de G
plt.figure(figsize=(12,6))
plt.subplot(1,2,1)
plt.plot(T.t,T.THETAP,label="$\dot{\\theta}$")
plt.plot(T.t,T.PHIP,label="$\dot{\phi}$")
plt.plot(T.t,T.PSIP,label="$\dot{\psi}$")
plt.title('vitesse de rotation')
plt.legend()
plt.subplot(1,2,2)
plt.plot(T.t,T.XG,label="$x_G$")
plt.plot(T.t,T.YG,label="$y_G$")
plt.plot(T.t,T.ZG,label="$z_G$")
plt.title('position de G')
plt.legend();

# tracer de l'énergie du système
plt.plot(T.t,T.EC-T.EC[0],label="Ec")
plt.plot(T.t,T.EP-T.EP[0],label="Ep")
plt.plot(T.t,T.EC+T.EP-T.EC[0]-T.EP[0],label="Et")
plt.title("énergie cinétique, potentielle et totale / a $t=0$")
plt.legend();

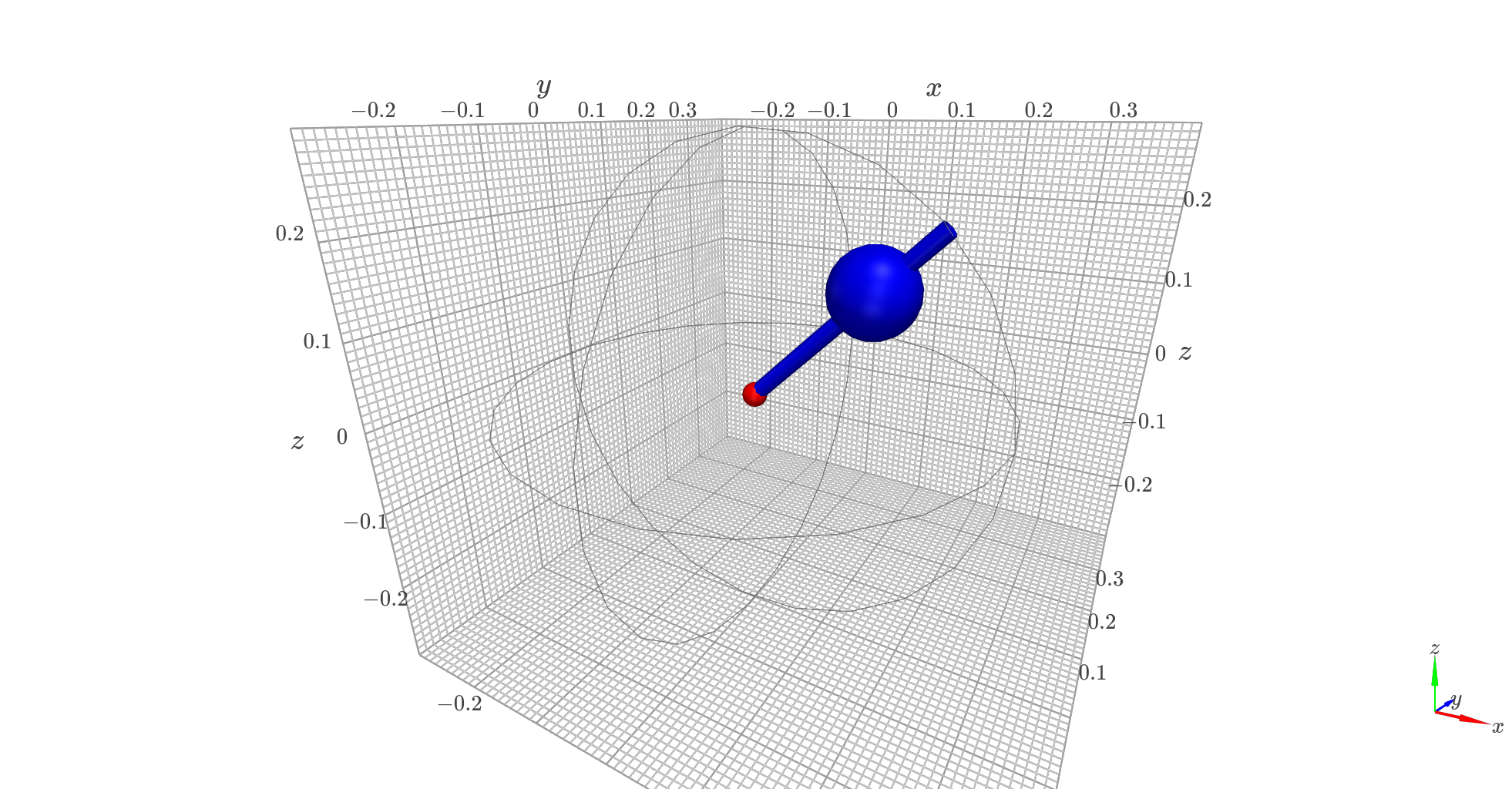
tracé du mouvement en 3D¶
Cas d'une solution avec des festons et une toupie qui retourne en arrière en décrivant des boucles sans tomber.
print("Mouvement toupie: cas sans frottement")
T.trace()
T.trajectoire()
images et animation de la solution¶
| position initiale | position finale |
 |
 |
animation de la solution¶
Valsnum = [(l,2*R), (alpha,g/R), (g,9.81), (R,0.1), (K,0), (m,0.2)]
display(Valsnum)
display(vals)
R_O=time_derivative(linear_momentum(R0,toupie),R0)+m*g*R0.z
display(R_O)
résolution numérique du mouvement¶
eq1=sp.simplify(Eqs.subs(vals).dot(R2.x)/(R**2*m/2))
display(eq1)
eq2=sp.simplify(Eqs.subs(vals).dot(R2.y)/(R**2*m/4)).subs(g,alpha*R)
display(eq2)
eq3=sp.simplify(Eqs.subs(vals).dot(R2.z)/(R**2*m/2))
display(eq3)
from Toupie import Toupie
# CI
Y0,tmax = CI(1)
Y0[-1]=400
display(Y0)
#
V = [theta,phi,psi,thetap,phip,psip]
EQS = [eq1.subs(Valsnum),eq2.subs(Valsnum),eq3.subs(Valsnum)]
CG = [G.pos_from(O).dot(R0.x).subs(Valsnum),
G.pos_from(O).dot(R0.y).subs(Valsnum),
G.pos_from(O).dot(R0.z).subs(Valsnum)]
EN = [sp.simplify(Ec.subs(vals)/m).subs(Valsnum),
(Ep.subs(vals)/m).subs(Valsnum)]
T = Toupie(V,EQS,CG,EN)
# calcul solution numérique
T.solve(Y0,tmax)
# tracer de la solution angles et positions de G
plt.figure(figsize=(12,6))
plt.subplot(1,2,1)
plt.plot(T.t,T.THETAP,label="$\dot{\\theta}$")
plt.plot(T.t,T.PHIP,label="$\dot{\phi}$")
plt.plot(T.t,T.PSIP,label="$\dot{\psi}$")
plt.title('vitesse de rotation')
plt.legend()
plt.subplot(1,2,2)
plt.plot(T.t,T.XG,label="$x_G$")
plt.plot(T.t,T.YG,label="$y_G$")
plt.plot(T.t,T.ZG,label="$z_G$")
plt.title('position de G')
plt.legend();

calcul de la réaction¶
on a donc : $$\phi = \frac{\pi}{2}, \dot{\theta} = cste , \dot{\psi} = cste \gg \dot{\theta}, \dot{\phi} \approx 0 $$
# solution approchée
vals2 = [(thetap.diff(),0),(phip.diff(),0),
(thetap, Y0[3]),(phip,Y0[4]),(psip,Y0[5]),
(theta,Y0[0]+Y0[3]*t),(phi,Y0[1]+Y0[4]*t),(psi,Y0[2]+Y0[5]*t)]
vals2
# composantes de R_O dans R0
R_Ox=R_O.dot(R0.x).subs(Valsnum).subs(vals2)
display(R_Ox)
R_Oy=R_O.dot(R0.y).subs(Valsnum).subs(vals2)
display(R_Oy)
R_Oz=R_O.dot(R0.z).subs(Valsnum).subs(vals2)
display(R_Oz)
poids = -(m*g).subs(Valsnum)
print("mg=",poids)
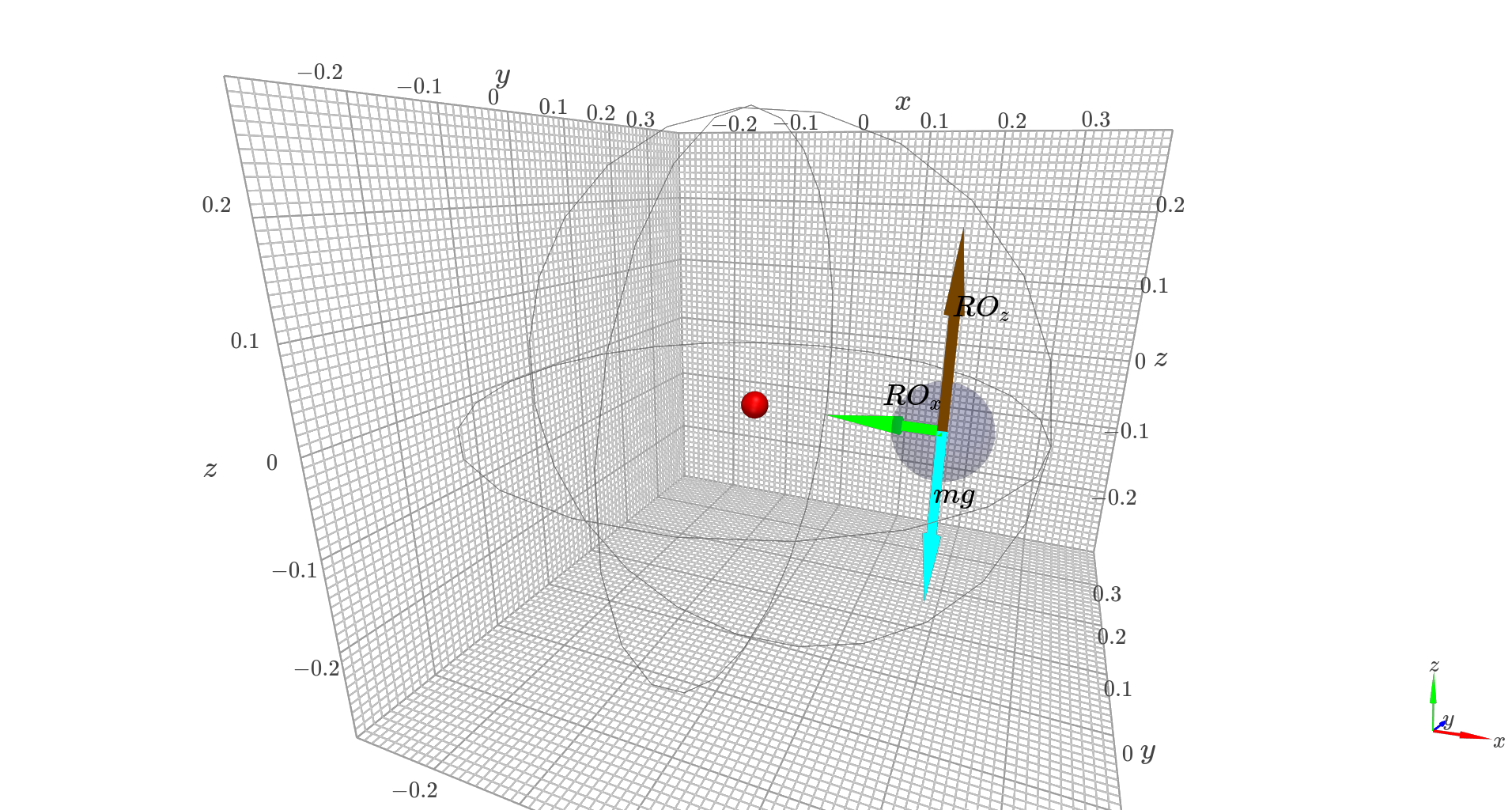
La réaction a donc une composante verticale qui compense exactement le poids et une compoante suivant l'axe de la toupie $R2.z$, qui correspond à l'accélération centrifuge associée au mouvement de précéssion
Gpt = np.array([T.XG[0],T.YG[0],T.ZG[0]]).astype(np.float32)
RR = 3*np.array([R_Ox.subs(t,0),R_Oy.subs(t,0),0.0]).astype(np.float32)
PP = 0.1*np.array([0,0,poids]).astype(np.float32)
print("Bilan des forces sur la toupie")
T.trace()
T.Tige.visible=False
T.Masse.opacity=0.3
T.plot += k3d.factory.vectors(Gpt,RR,color=0x00ff00,line_width=0.01,shader='mesh', head_size=0.4,labels=[" RO_x"])
T.plot += k3d.factory.vectors(Gpt,PP,color=0x00ffff,line_width=0.01,shader='mesh', head_size=0.4,labels=[" mg"])
T.plot += k3d.factory.vectors(Gpt,-PP,color=0x774400,line_width=0.01,shader='mesh', head_size=0.4,labels=[" RO_z"])
visualisation des forces en G¶
Simulation du cas avec frottement $K\neq 0$¶
Valsnum = [(l,2*R), (alpha,g/R), (g,9.81), (R,0.1), (K,0.8)]
display(Valsnum)
display(vals)
eq1=sp.simplify(Eqs.subs(vals).dot(R2.x)/(R**2*m/2))
display(eq1)
eq2=sp.simplify(Eqs.subs(vals).dot(R2.y)/(R**2*m/4)).subs(g,alpha*R)
display(eq2)
eq3=sp.simplify(Eqs.subs(vals).dot(R2.z)/(R**2*m/2))
display(eq3)
from Toupie import Toupie
# CI
Y0,tmax = CI(1)
display(Y0)
#
V = [theta,phi,psi,thetap,phip,psip]
EQS = [eq1.subs(Valsnum),eq2.subs(Valsnum),eq3.subs(Valsnum)]
CG = [G.pos_from(O).dot(R0.x).subs(Valsnum),
G.pos_from(O).dot(R0.y).subs(Valsnum),
G.pos_from(O).dot(R0.z).subs(Valsnum)]
EN = [sp.simplify(Ec.subs(vals)/m).subs(Valsnum),
(Ep.subs(vals)/m).subs(Valsnum)]
T = Toupie(V,EQS,CG,EN)
# calcul solution numérique
T.solve(Y0,tmax,Np=400)
# tracer de la solution angles et positions de G
plt.figure(figsize=(12,6))
plt.subplot(1,2,1)
plt.plot(T.t,T.THETAP,label="$\dot{\\theta}$")
plt.plot(T.t,T.PHIP,label="$\dot{\phi}$")
plt.plot(T.t,T.PSIP,label="$\dot{\psi}$")
plt.title('vitesse de rotation')
plt.legend()
plt.subplot(1,2,2)
plt.plot(T.t,T.XG,label="$x_G$")
plt.plot(T.t,T.YG,label="$y_G$")
plt.plot(T.t,T.ZG,label="$z_G$")
plt.title('position de G')
plt.legend();

# tracer de l'énergie du système
plt.plot(T.t,T.EC,label="Ec")
plt.plot(T.t,T.EP,label="Ep")
plt.plot(T.t,T.EC+T.EP,label="Et")
plt.title("énergie cinétique, potentielle et totale")
plt.legend();

visualisation 3D du mouvement¶
la toupie commence avec un mouvement de précession, mais la décroissance de sa rotation propre entraine sa chute, et elle termine avec un mouvement de pendule en rotation (pendule de Tournesol)
print("Cas avec frottement: la toupie tombe")
T.trace()
T.trajectoire()
images et animation de la solution avec frottement¶
| position initiale | position finale |
 |
 |