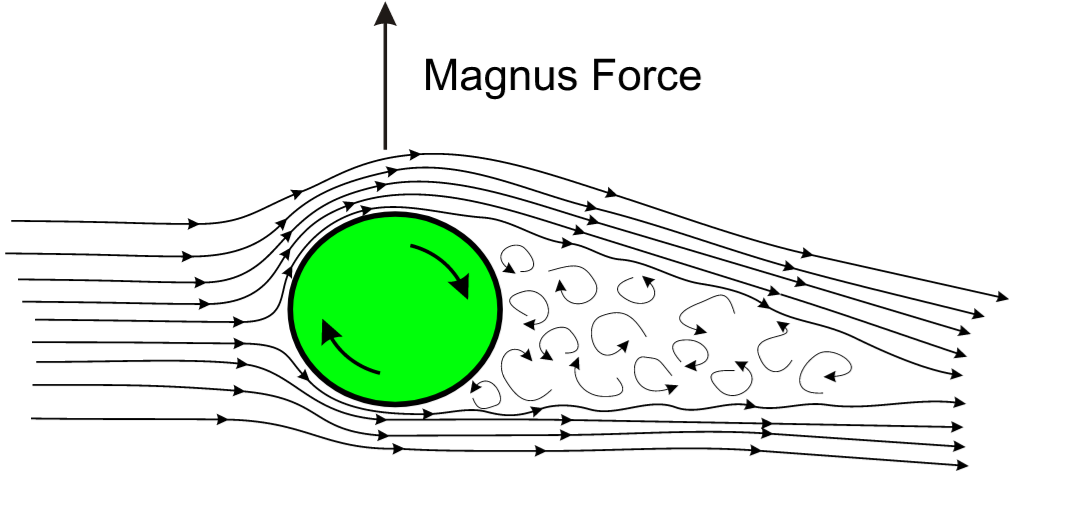
Effet Magnus: écoulement potentiel autour d'un cylindre¶
Marc BUFFAT, département mécanique, université Lyon 1
%matplotlib inline
%autosave 300
import numpy as np
import sympy as sp
import sympy.vector as sv
sp.init_printing()
import matplotlib.pyplot as plt
from matplotlib import rcParams
rcParams['font.family'] = 'serif'
rcParams['font.size'] = 14
hypothèses¶
- fluide parfait,
- écoulement incompressible
- stationnaire 2D
- irrotationel
donc le champ de vitesse découle d'un potentiel
$$\mathbf{U} = \nabla \Phi \mbox{ avec } u = \frac{\partial \phi}{\partial x}, v = \frac{\partial \phi}{\partial y} $$équation de Laplace pour le potentiel $\Phi$
$$ \Delta \Phi = 0 $$de même la fonction de courant $$ u = \frac{\partial \psi}{\partial y}, v = -\frac{\partial \psi}{\partial x} $$
vérifie
$$ \Delta \psi = 0 $$R0 = sv.CoordSys3D('R_0')
display(R0)
x = R0.x
y = R0.y
U0, R, K, Gamma = sp.symbols('U_0 R K Gamma')
Solution potentiel¶
La fonction de courant $\psi$ vérifie
$$\Delta \psi = 0 $$
- la solution est obtenue par principe de superposition $$\psi = \psi_1 + \psi_2 + \psi_3$$
# 1/ psi1 correspond à un champ uniforme
psi1 = U0*y
# verification equation de laplace
sv.divergence(sv.gradient(psi1))
# 2/ psi2 correspond à un doublet
psi2 = -K*y/(x**2+y**2)
sv.gradient(psi2)
# verification equation de laplace
sv.divergence(sv.gradient(psi2)).simplify()
# 3/ psi3 correspond à un tourbillon
psi3 = -Gamma/(2*sp.pi)*sp.log(x**2+y**2)
# verification equation de laplace
sv.divergence(sv.gradient(psi3)).simplify()
solution générale¶
$$\psi = \psi_1 + \psi_2 + \psi_3$$et
$$\Delta \psi = 0$$psi = psi1 + psi2.subs(K,U0*R**2) + psi3
display(psi)
def trace_solution(psi,R,titre):
# conversion fonction numpy
F = sp.lambdify([R0.x,R0.y],psi,'numpy')
# grille de calcul
N = 40
X1 = np.linspace(-3*R,3*R,N)
Y1 = np.linspace(-2*R,2*R,N)
X, Y = np.meshgrid(X1,Y1)
FXY = F(X,Y)
# filtrage
for i in range(N):
for j in range(N):
if (X[i,j]**2 + Y[i,j]**2) < 0.8*R**2 : FXY[i,j] = 0.
# tracer
plt.figure(figsize=(10,8))
ax = plt.gca()
CS = ax.contour(X, Y, FXY, levels=31)
ax.clabel(CS, inline=1, fontsize=10)
plt.axis('equal')
if titre != None : ax.set_title(titre)
cercle = plt.Circle((0., 0.), R, color='k',zorder=10)
ax.add_artist(cercle)
return
cas uniforme $\psi=\psi_1$¶
rayon=1
valnum = { U0:2, R:0, Gamma:0}
psi0 = psi.subs(valnum)
display("psi=",psi0)
trace_solution(psi0,rayon,"Ecoulement uniforme")

cas sans rotation $\psi = \psi_1 + \psi_2$¶
valnum = { U0:2, R:rayon, Gamma:0}
psi0 = psi.subs(valnum)
display("psi=",psi0)
trace_solution(psi0,rayon,"Cylindre immobile")

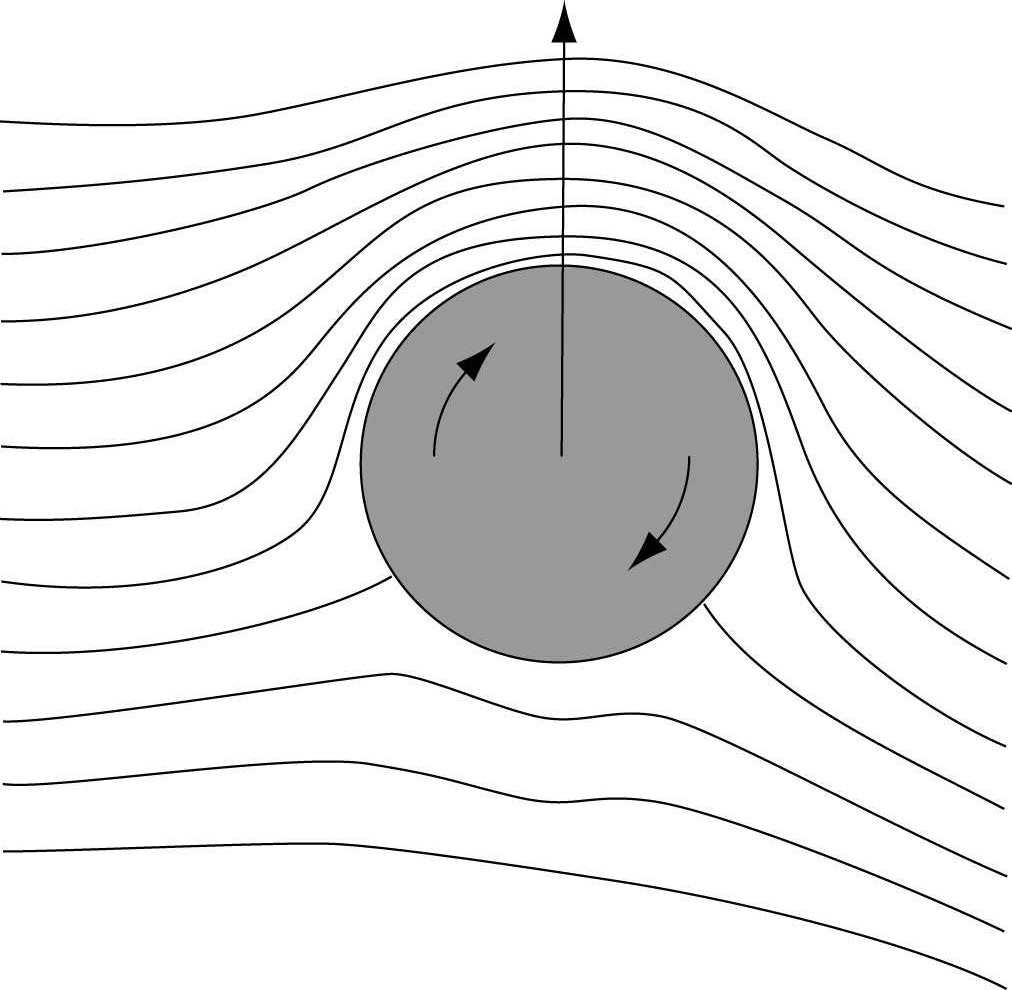
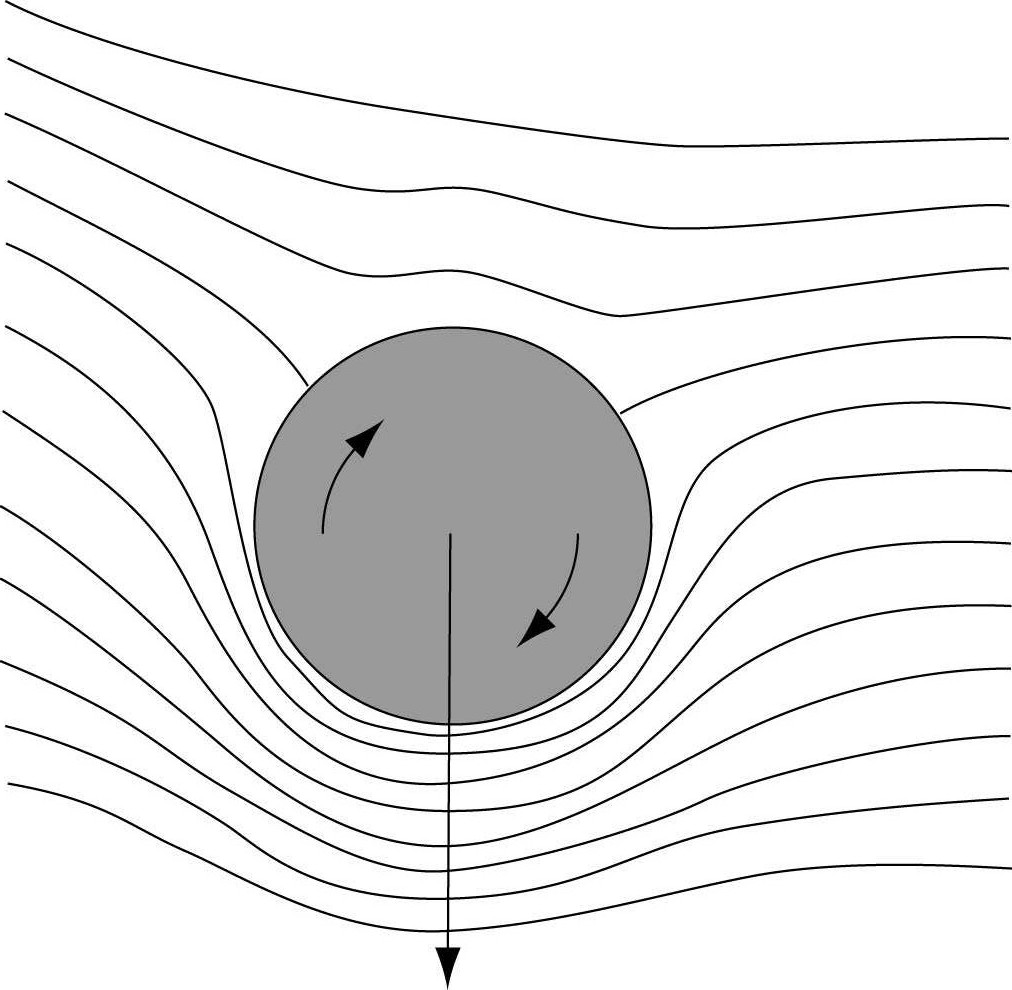
Cas avec rotation: $\psi = \psi_1 + \psi_2 + \psi_3$¶
valnum = { U0:2, R:rayon, Gamma:5}
psi0 = psi.subs(valnum)
display('psi=',psi0)
trace_solution(psi0,rayon,"Cylindre en rotation")

Calcul de la pression¶
bilan de qte de mouvement
$$ \frac{\partial \rho \vec{U} } {\partial t} + div(\rho \vec{U} \times \vec{U}) = - \vec{\nabla} p $$ soit en terme d'accélération $$\rho \frac{D \vec{U}}{D t} = \rho \frac{\partial \vec{U} } {\partial t} + \rho \vec{U} . \vec{\nabla} \vec{U} = - \vec{\nabla} p $$
en utilisant la relation vectorielle
$$ \vec{grad}(\frac{1}{2} U^2) = \vec{U} . \vec{grad} \vec{U} + \vec{U} \wedge \vec{rot}\vec{U} $$ on obtiens
$$ \vec{grad}(\frac{\rho}{2} U^2 + p) - \rho \vec{U} \wedge \vec{rot}\vec{U} = \vec{0} $$
ce qui donne Bernoulli si $\vec{rot}\vec{U} = \vec{0}$ $$ \frac{\rho}{2} U^2 + p = cste $$
en notant que $u = \frac{\partial \psi}{\partial y} , v = -\frac{\partial \psi}{\partial x}$ $$ p = \frac{\rho}{2} U_0^2 - \frac{\rho}{2} \vec{\nabla}^2 \psi $$
# demonstration
Nabla = sv.Del()
rho0 = sp.symbols('rho_0')
p = sp.Function('p')(x,y)
u = sp.Function('u')(x,y)
v = sp.Function('v')(x,y)
U = u*R0.i + v*R0.j
display("U=",U)
display("gradU=",Nabla(U))
# verification de la relation vectorielle
display("1/2grad(U*U)=",sv.gradient(U.dot(U)/2).doit())
display("U.grad(U)=",U.dot(Nabla(U)).doit())
display("U^rot(U)=" ,U.cross(sv.curl(U)))
display("verification (1)-(2)-(3) =",(sv.gradient(U.dot(U)/2).doit() - U.dot(Nabla(U)).doit() - U.cross(sv.curl(U))).simplify())
# calcul de la pression
pr = rho0*U0**2/2 -rho0/2*U.dot(U)
display("Pr=",pr)
pr = rho0*U0**2/2-rho0/2*sv.gradient(psi).dot(sv.gradient(psi))
display("Pr=",pr)
valnum = { rho0:1, U0:2, R:rayon, Gamma:0}
pr0 = pr.subs(valnum)
display(pr0)
trace_solution(pr0,rayon,"pression cylindre immobile")

valnum = { rho0:1, U0:2, R:rayon, Gamma:5}
pr0 = pr.subs(valnum)
display(pr0)
trace_solution(pr0,rayon,"pression cylindre en rotation")

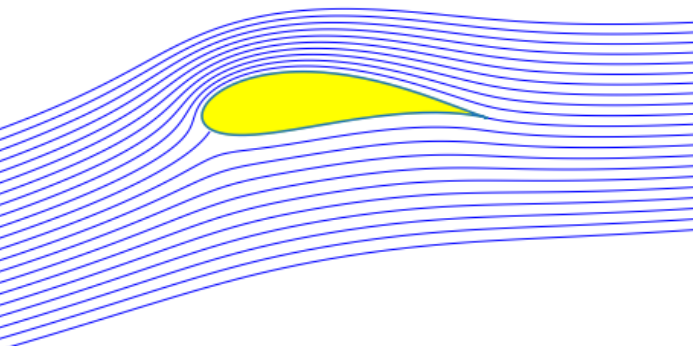
Lien avec la théorie de l'aile¶
- transformation conforme dans le plan complexe:
On définit un potentiel complexe $\Phi(z)$: $$\Psi(z) = \phi(x,y) + i \psi(x,y)$$
On définit une transformation conforme $Z=F(z)$ qui préserve les angles dans le plan complexe.
- Transformation de Joukovski
avec $ z = x + i y $ (plan d'origine) et $Z = X + i Y$ (plan transformé)
On obtiens ainsi l'écoulement autour du profil vérifiant la condition de Kutta-Joukovsky au bord de fuite
Equivalence: vitesse de rotation $\omega$ et angle d'incidence $\alpha$
Donc la portance d'un profil d'aile est liée à la circulation de vitesse autour du profil

FIN¶