Le Brachistochrone (temps le plus court en grec ancien) est le nom donné à une expérience qui permet de montrer que le chemin le plus rapide n'est pas toujours celui que l'on croît ! Nous avons repris les images d'une expérience réalisée à l'EPFL en Suisse. L'expérience a été filmée avec une caméra rapide avec 940 images par seconde.
Les boules partent au même moment avec une vitesse initiale nulle. Après avoir constaté l'ordre d'arrivée des boules, on souhaite analyser plus en détail cette expérience:
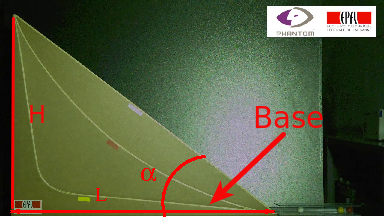
- Tout d'abord on va étudier le déplacement d'une boule roulant sur un plan incliné (boule blanche). On va comparer cette expérience à un modèle théorique.
- Ensuite, on étudiera chaque trajectoire et on calculera sa longueur. On estimera ainsi la vitesse moyenne de chaque boule entre le point de départ et le point d'arrivée.
Note : Pour ce TP, il sera nécessaire d'importer les bibliothèques suivantes :numpy, matplotlib.pyplot et imageio