main
creer une image
charger un maillage et ses matières
extraire les sources de lumiere (trouver les triangles dont la matière émet de la lumiere)
pour chaque pixel de l'image :
générer un rayon dans le repere de la scene
// trouver le point de la scène visible pour le rayon
pour chaque triangle :
transformer le rayon dans le repere local de l'objet
calculer l'intersection du rayon avec le triangle,
conserver l'intersection si elle est valide et plus proche que la dernière trouvée
si une intersection valide existe
ecrire un pixel blanc dans l'image
sauver l'image
./bin/shader_kit data/shaders/mesh.glsl mesh.obj
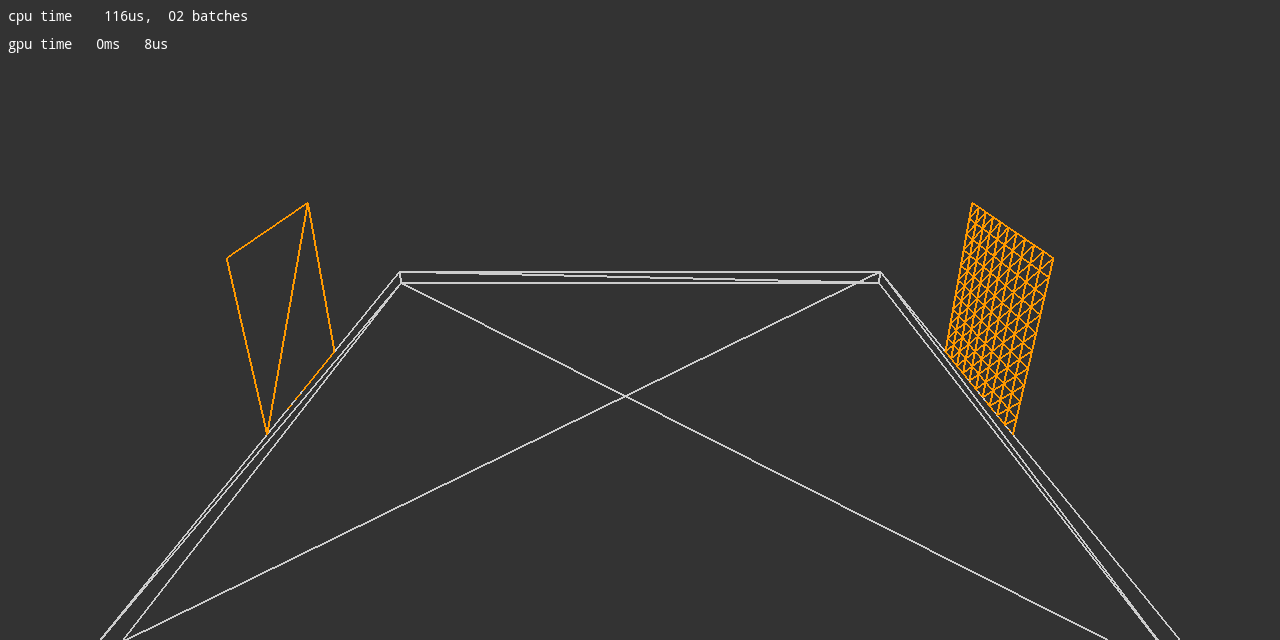
Construisez un arbre binaire : chaque noeud contient
une boite englobante alignée sur les axes et les indices de ses 2
fils. Les feuilles contiennent l'indice d'un triangle. L'arbre est
donc représenté par un vecteur de noeuds et un vecteur de
triangles, l'indice de la racine et sa boite englobante.
Un algorithme de construction simple consiste à
calculer (récursivement en partant de la racine) pour chaque noeud
:
la boite englobante des centres des triangles,
l'axe le plus allongé de cette boite
englobante,
la répartition des triangles par rapport au
centre de la boite sur l'axe le plus étiré.
il suffit de recommencer pour chaque sous ensemble
de triangles, jusqu'a obtenir 1 seul triangle.
indications :
utilisez un functor et la fonction std::partition()
pour répartir les triangles entre les fils gauche et droit. il est
inutile d'utiliser un tri complet...
struct BBox { ... };
struct BVHNode { ... };
struct Triangle { ... };
unsigned int build_node( std::vector<BVHNode>& nodes, std::vector<Triangle>& triangles, const unsigned int begin, const unsigned int end )
{
if(end - begin <= 1)
{
// construire une feuille qui reference le triangle d'indice begin
// renvoyer l'indice de la feuille
}
// construire la boite englobante des centres des triangles d'indices [begin .. end[
// trouver l'axe le plus etire de la boite englobante
int axe= ...
// couper en 2 au milieu de boite englobante sur l'axe le plus etire
float coupe= ...
// partitionner les triangles par rapport a la "coupe"
Triangle *pmid= std::partition(triangles.data() + begin, triangles.data() + end, predicat(axe, coupe))
unsigned int mid= std::distance(triangles.data(), pmid);
// construire le fils gauche
unsigned int left= build_node(nodes, triangles, begin, mid)
// construire le fils droit
unsigned int right= build_node(nodes, triangles, mid, end)
// construire le noeud
// renvoyer l'indice du noeud
}
predicat() est un functeur c++, une classe
définissant l'operateur () :
struct predicat
{
int axe;
float coupe;
predicat( const int _axe, const float _coupe ) : axe(_axe), coupe(_coupe) {}
bool operator() ( const Triangle& t ) const
{
// calculer le centre du triangle
// renvoyer vrai s'il se trouve avant la coupe...
}
};
indication : utilisez les indices des noeuds,
pas de pointeurs pour la représentation des noeuds. il sera très
simple de transformer le bvh en storage buffers pour la version
compute shader.
Utilisez l'arbre construit à l'exercice précédent
pour trouver l'intersection valide la plus proche de l'origine
d'un rayon.
Commencez par vous convaincre que ça fonctionne :
calculez le nombre de rayons passant par chaque noeud lors d'un
parcours de N rayons et vérifiez qu'il correspond au SAH du noeud
(rapport de l'aire de l'englobant du noeud par l'aire de
l'englobant de la scène).
Comment générer N rayons uniformes ?
Programmez la recherche exhaustive vue en cours :
- "Ray Tracing Deformable Scenes using Dynamic Bounding Volume Hierarchies"
I. Wald, S. Boulos, P. Shirley, 2007
ou la version rapide :
c'est un peu lent, non ?
lisez les tutoriels de gKit concernant les compute shaders et les
storage buffers (et les storage textures, eventuellement)
Ecrivez un compute shader calculant toutes les intersections rayons / triangles, l'équivalent de la fonction intersect() du ray_tuto.cpp
Le shader prend en entrée plusieurs storage buffers
avec les rayons à tester, ainsi que les triangles.
La sortie est un vecteur avec un hit par rayon. La structure hit
contient au minimum : l'indice du triangle ainsi que u et v, les
coordonnées barycentriques du point d'intersection.
Comment paralléliser la boucle ? est-ce que chaque
thread traite les intersections d'un triangle ? ou d'un rayon ?
est-il nécessaire d'utiliser de la synchronisation ?
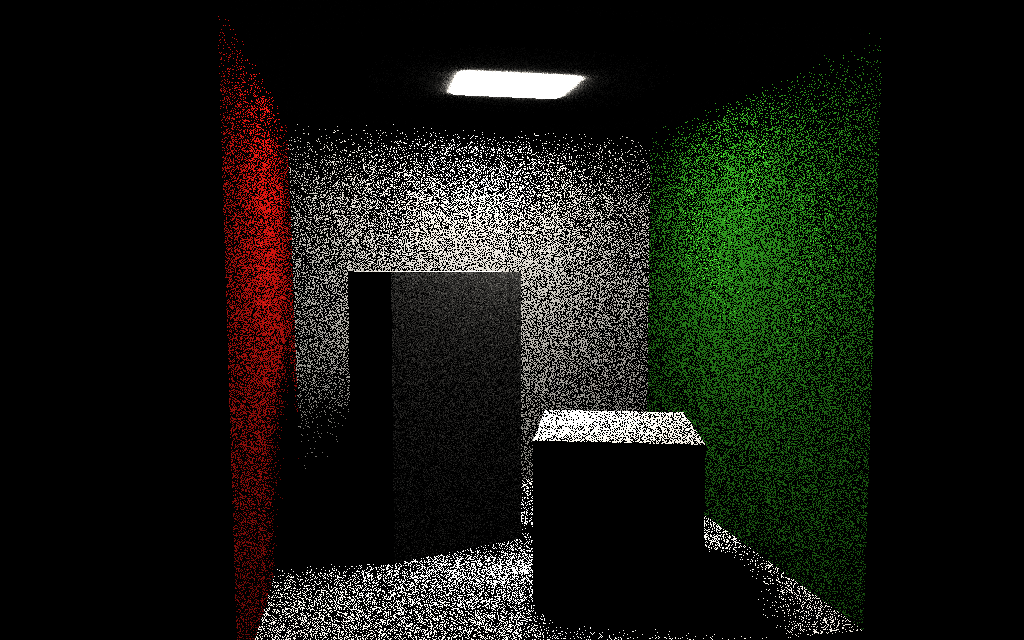
Comment utiliser ce shader pour calculer l'éclairage direct ?
Faut-il restructurer l'algorithme de rendu ?
Comment transformer un bvh pour pouvoir le parcourir
sans utiliser de pile ?
indication : un parcours en profondeur à une
structure très (très) régulière...
Le shader prend en entrée plusieurs storage buffers
avec les rayons à tester, ainsi que les noeuds de l'arbre, et le
vecteur de triangles.
La sortie est un vecteur de hits, contenant au minimum : l'indice
du triangle ainsi que u et v, les coordonnées barycentriques du
point d'intersection.
cf ray_tuto.cpp
#include <cfloat>
#include <cmath>
#include "vec.h"
#include "color.h"
#include "mat.h"
#include "mesh.h"
#include "wavefront.h"
#include "image.h"
#include "image_io.h"
#include "image_hdr.h"
#include "orbiter.h"
#define EPSILON 0.00001f
//! representation d'un rayon.
struct Ray
{
Point o; //!<
origine.
Vector d;
//!< direction.
float tmax;
//!< abscisse max pour les intersections valides.
Ray( const Point origine, const
Point extremite ) : o(origine), d(Vector(origine, extremite)),
tmax(1) {}
Ray( const Point origine, const
Vector direction ) : o(origine), d(direction), tmax(FLT_MAX) {}
//! renvoie le
point a l'abscisse t sur le rayon
Point operator( ) ( const float t
) const { return o + t * d; }
};
//! representation d'un point d'intersection.
struct Hit
{
Point p;
//!< position.
Vector n;
//!< normale.
float t;
//!< t, abscisse sur le rayon.
float u, v;
//!< u, v coordonnees barycentrique dans
le triangle.
int object_id; //! indice du
triangle dans le maillage.
Hit( ) : p(), n(), t(FLT_MAX),
u(0), v(0), object_id(-1) {}
};
struct Triangle : public TriangleData
{
Triangle( ) : TriangleData() {}
Triangle( const TriangleData&
data ) : TriangleData(data) {}
/* calcule l'intersection
ray/triangle
cf "fast,
minimum storage ray-triangle intersection"
http://www.graphics.cornell.edu/pubs/1997/MT97.pdf
renvoie
faux s'il n'y a pas d'intersection valide, une intersection peut
exister mais peut ne pas se trouver dans l'intervalle [0 htmax]
du rayon. \n
renvoie
vrai + les coordonnees barycentriques (ru, rv) du point
d'intersection + sa position le long du rayon (rt). \n
convention
barycentrique : t(u, v)= (1 - u - v) * a + u * b + v * c \n
*/
bool intersect( const Ray
&ray, const float htmax, float &rt, float &ru,
float&rv ) const
{
/* begin
calculating determinant - also used to calculate U parameter */
Vector ac=
Vector(Point(a), Point(c));
Vector
pvec= cross(ray.d, ac);
/* if
determinant is near zero, ray lies in plane of triangle */
Vector ab=
Vector(Point(a), Point(b));
float det=
dot(ab, pvec);
if(det
> -EPSILON && det < EPSILON)
return false;
float
inv_det= 1.0f / det;
/*
calculate distance from vert0 to ray origin */
Vector
tvec(Point(a), ray.o);
/*
calculate U parameter and test bounds */
float u=
dot(tvec, pvec) * inv_det;
if(u <
0.0f || u > 1.0f)
return false;
/* prepare
to test V parameter */
Vector
qvec= cross(tvec, ab);
/*
calculate V parameter and test bounds */
float v=
dot(ray.d, qvec) * inv_det;
if(v <
0.0f || u + v > 1.0f)
return false;
/*
calculate t, ray intersects triangle */
rt=
dot(ac, qvec) * inv_det;
ru= u;
rv= v;
// ne
renvoie vrai que si l'intersection est valide (comprise entre
tmin et tmax du rayon)
return (rt
<= htmax && rt > EPSILON);
}
//! renvoie l'aire du triangle
float area( ) const
{
return
length(cross(Point(b) - Point(a), Point(c) - Point(a))) / 2.f;
}
//! renvoie un point a l'interieur
du triangle connaissant ses coordonnees barycentriques.
//! convention p(u, v)= (1 - u -
v) * a + u * b + v * c
Point point( const float u, const
float v ) const
{
float w=
1.f - u - v;
return
Point(Vector(a) * w + Vector(b) * u + Vector(c) * v);
}
//! renvoie une normale a
l'interieur du triangle connaissant ses coordonnees
barycentriques.
//! convention p(u, v)= (1 - u -
v) * a + u * b + v * c
Vector normal( const float u,
const float v ) const
{
float w=
1.f - u - v;
return
Vector(na) * w + Vector(nb) * u + Vector(nc) * v;
}
};
//! representation d'une source de lumiere.
struct Source : public Triangle
{
Color
emission; //! flux emis.
Source( ) : Triangle(), emission()
{}
Source( const TriangleData&
data, const Color& color ) : Triangle(data), emission(color)
{}
};
// ensemble de sources de lumieres
std::vector<Source> sources;
// recuperer les sources de lumiere du mesh :
triangles associee a une matiere qui emet de la lumiere,
material.emission != 0
int build_sources( const Mesh& mesh )
{
for(int i= 0; i <
mesh.triangle_count(); i++)
{
//
recupere la matiere associee a chaque triangle de l'objet
Material
material= mesh.triangle_material(i);
if((material.emission.r + material.emission.g +
material.emission.b) > 0)
// inserer la source de lumiere dans l'ensemble.
sources.push_back( Source(mesh.triangle(i), material.emission)
);
}
printf("%d sources.\n", (int)
sources.size());
return (int) sources.size();
}
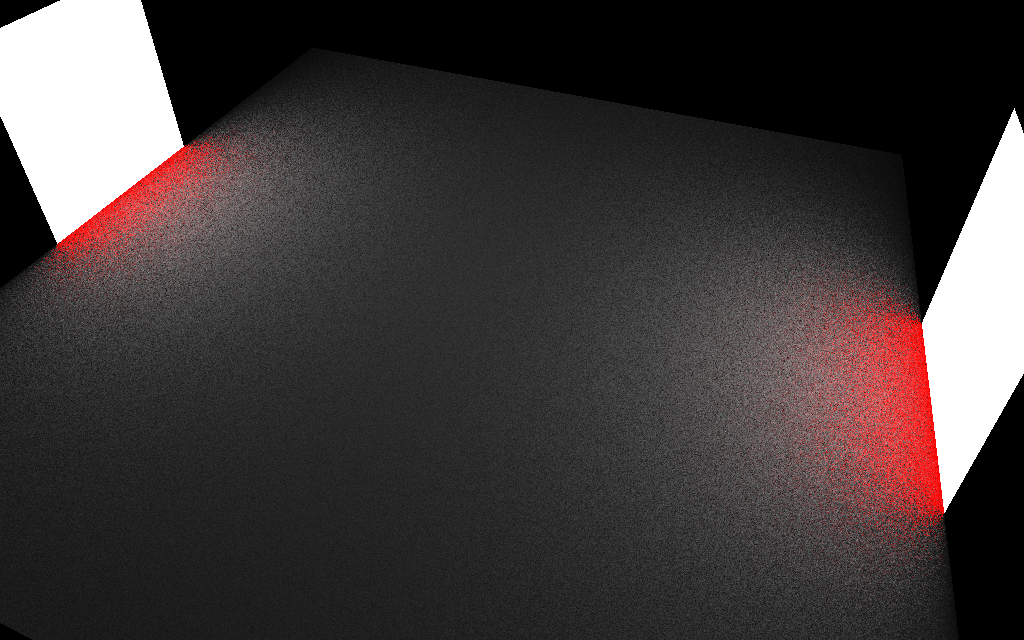
// verifie que le rayon touche une source de lumiere.
bool direct( const Ray& ray )
{
for(size_t i= 0; i <
sources.size(); i++)
{
float t,
u, v;
if(sources[i].intersect(ray, ray.tmax, t, u, v))
return true;
}
return false;
}
// ensemble de triangles
std::vector<Triangle> triangles;
// recuperer les triangles du mesh
int build_triangles( const Mesh &mesh )
{
for(int i= 0; i <
mesh.triangle_count(); i++)
triangles.push_back( Triangle(mesh.triangle(i)) );
printf("%d triangles.\n", (int)
triangles.size());
return (int) triangles.size();
}
// calcule l'intersection d'un rayon et de tous les
triangles
bool intersect( const Ray& ray, Hit& hit )
{
hit.t= ray.tmax;
for(size_t i= 0; i <
triangles.size(); i++)
{
float t,
u, v;
if(triangles[i].intersect(ray, hit.t, t, u, v))
{
hit.t= t;
hit.u= u;
hit.v= v;
hit.p= ray(t); // evalue la
positon du point d'intersection sur le rayon
hit.n= triangles[i].normal(u, v);
hit.object_id= i; // permet de retrouver
toutes les infos associees au triangle
}
}
return (hit.object_id != -1);
}
// construit un repere ortho tbn, a partir d'un seul
vecteur...
// cf "generating a consistently oriented tangent
space"
//
http://people.compute.dtu.dk/jerf/papers/abstracts/onb.html
struct World
{
World( const Vector& _n ) :
n(_n)
{
if(n.z
< -0.9999999f)
{
t= Vector(0, -1, 0);
b= Vector(-1, 0, 0);
}
else
{
float a= 1.f / (1.f + n.z);
float d= -n.x * n.y * a;
t= Vector(1.f - n.x * n.x * a, d, -n.x);
b= Vector(d, 1.f - n.y * n.y * a, -n.y);
}
}
Vector operator( ) ( const
Vector& local ) const
{
return
local.x * t + local.y * b + local.z * n;
}
Vector t;
Vector b;
Vector n;
};
// objet
Mesh mesh;
int main( int argc, char **argv )
{
// init generateur aleatoire
srand48(time(NULL));
// lire un maillage et ses
matieres
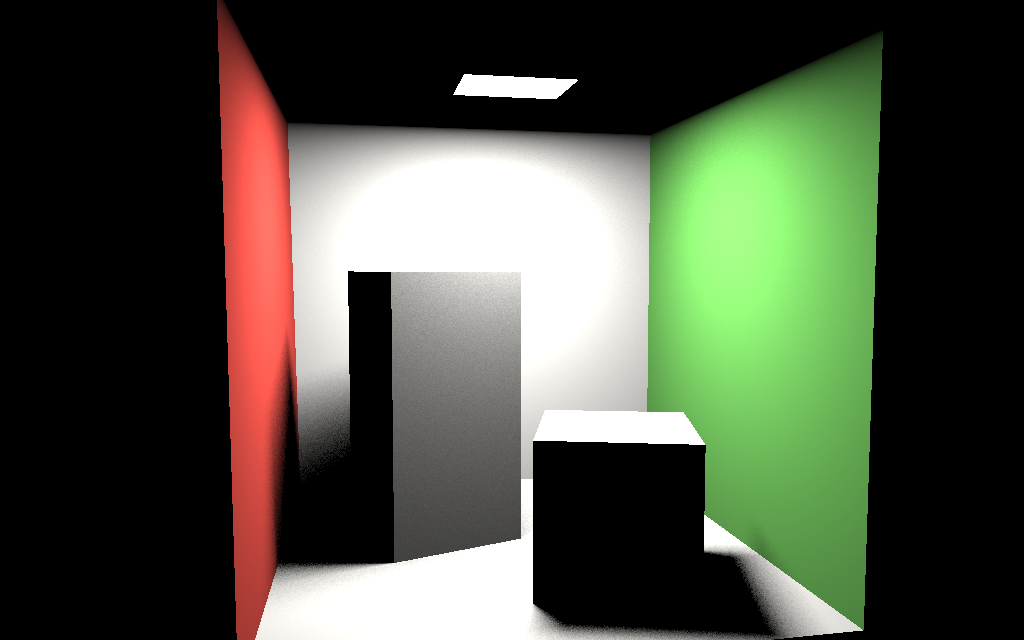
mesh= read_mesh("cornell.obj");
if(mesh == Mesh::error())
return 1;
// extraire les
sources
build_sources(mesh);
// extraire les triangles du
maillage
build_triangles(mesh);
// relire une camera
Orbiter camera;
camera.read_orbiter("orbiter.txt");
// placer une source de
lumiere
Point light= camera.position();
// creer l'image pour stocker le
resultat
Image image(1024, 640);
// multi thread avec OpenMP
#pragma omp parallel for schedule(dynamic, 16)
for(int y= 0; y <
image.height(); y++)
for(int x= 0; x <
image.width(); x++)
{
Point o= {
... }; // origine du rayon
Point e= {
... }; // extremite du rayon
Ray ray(o,
e);
Hit hit;
if(intersect(ray, hit))
{
// calculer l'eclairage direct
Color direct= { ... };
// calculer l'eclairage indirect
Color indirect= { ... };
image(x, y)= Color(Red(), 1);
}
}
write_image(image, "render.png");
write_image_hdr(image, "render.hdr");
return 0;
}